DETEKCIJA OSOBA U SLIKAMA
|
|
|
- Melanie Grant
- 6 years ago
- Views:
Transcription
1 SVEUČILIŠTE U ZAGREBU FAKULTET ELEKTROTEHNIKE I RAČUNARSTVA ZAVRŠNI RAD br. 173 DETEKCIJA OSOBA U SLIKAMA Davor Sutić Zagreb, lipanj 2008.
2
3 Sadržaj 1 Uvod Detekcija pješaka u prometu Izazovi prepoznavanja pješaka temeljenog na obliku siluete Povezani radovi Izrada klasifikatora Značajke Temeljne značajke: pokazivači Značajke druge razine: obrisi AdaBoost Teoretska podloga AdaBoosta Implementacija AdaBoosta Programska implementacija Testiranje i rezultati Parametri Detekcija pješaka u slikama Ubrzanje klasificiranja prozora Detekcija pješaka klasifikacijom prozora Zaključak Dodatak Literatura Sažetak i ključne riječi Detekcija osoba u slikama People detection in images Prilozi... 39
4 1 Uvod Prepoznavanje osoba područje je rastućeg zanimanja akademske zajednice i industrije. Neke primjene mogu biti: Prepoznavanje ljudskog oblika u budućnosti bi moglo zamijeniti klasične metode označavanja osoba na Web 2.0 servisima. Dovoljno napredan sustav mogao bi predlagati imena osoba na slikama temeljem sličnosti s do sada označenim slikama. Slike postavljene na ove servise obično su namijenjene dijeljenju s ostalim korisnicima i nalaze se u većoj rezoluciji u odnosu na, primjerice, kamere koje nalazimo u video nadzoru. Robustan algoritam detekcije osoba koristan je u video nadzoru. Napredni algoritmi pomažu u automatizaciji nadgledanja ili izdvajaju manje količine video zapisa koje se ručno pregledavaju. Pozadina je obično statična i može se učiti, što olakšava detekciju. Područje primjene je i analiza ponašanja. Detekcija osoba pred izlogom mogla bi odgovoriti na pitanje gdje i koliko dugo kupci zastaju, te koje proizvode gledaju. Praćenjem osobe može se utvrditi koje je sve skupine artikala kupila. Oko 15% smrtnih slučajeva u prometu događa se u nesrećama koje uključuju pješake (Bu, 2005). Metodama detekcije pješaka i predviđanja moguće nesreće nastoji se ovaj broj bitno smanjiti. Uz nastojanja da se vozila naprave što sigurnijima pri sudaru, detekcija pješaka djeluje preventivno utoliko da pomaže uočiti potencijalnu kriznu situaciju. Zadaća detekcije pješaka u prometu težak je problem u odnosu na prije nabrojene. U vrijeme pisanja ovog rada u vozila se ne ugrađuju sustavi koji bi pomagali vozaču temeljem računalnog vida. Eksperimentalni sustavi spomenuti su u poglavlju o bliskim radovima. Povećanje dostupne računalne snage i novi algoritmi daju naslutiti da bi se upotrebljiv sustav mogao uskoro pronaći i za ovu uporabu. Tema je ovog rada detekcija osoba u slikama. Kao uže područje rada obrađena je detekcija pješaka u slikama, jer je detekcija osoba u prometu najteža i najčešće istraživana primjena, pa je uspjehe s ovog područja lakše prenijeti na druga područja, nego obratno. 1
5 1.1 Detekcija pješaka u prometu Zahtjevi na uporabljiv algoritam detekcije pješaka su: Za uporabljiv sustav traži se velika pouzdanost, mali broj krivih detekcija (eng. false positives) U prometu se pješaci susreću na slikama s velikim brojem pozadina, vremenskih uvjeta i uvjeta osvjetljenja Različite udaljenosti i brzine kretanja pješaka za koje sustav treba raditi Sustav koji bi zadovoljavao navedene kriterije u trenutku pisanja rada nije stavljen u uporabu, pa je ovo aktivno područje istraživanja. Pristup se ne ograničava samo na računalni vid, već se koristi čitav niz senzornih sustava: a) Piezoelektrični senzor Senzori se ugrađuju u pod i električni signali se generiraju u ovisnosti o pritisku koji stvara osoba koja se nalazi na podlozi. Uporabu su pronašli na pješačkim prijelazima, gdje omogućuju detekciju pješaka koji čekaju ili prolaze kolnikom. Ova vrsta senzora omogućuje veliku pouzdanost i ne zahtijeva kompleksno procesiranje signala (Bu, 2005). Pristup se navodi zbog kompletnosti izlaganja, a ima malo sličnosti s pristupom ovog rada. b) Podzvučni senzori Senzori emitiraju podzvučne valove koji se reflektiraju na pješacima i vraćaju u primaocu. Na temelju reflektiranog signala računa se veličina, brzina i udaljenost objekta. Moguće je detektirati pješake na udaljenosti od oko 10m. Pokazuje se da na uspjeh detekcije bitno utječu vremenske prilike, te materijal odjeće pješaka (Bu, 2005). c) Mikrovalni radar Oruđe detekcije ovog senzora je elektromagnetski val odašiljan s mikrovalne antene. U usporedbi s procesiranjem računalnog vida, signale je manje zahtjevno obrađivati računalom. Za razliku od podzvučnih senzora, ova vrsta detekcije manje ovisi o 2
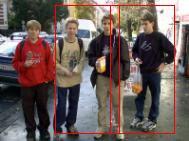
6 vremenskim prilikama kao što su vlaga ili pritisak zraka. Radar može biti ugrađen u unutrašnjost vozila bez narušavanja vanjskog dizajna. d) Laser Infracrvena laserska zraka se emitira, reflektira i vraća u senzor. Tehnologija je vrlo precizna u usporedbi s drugim metodama i omogućuje precizno mjerenje udaljenosti (do u red veličine cm). Vozilo se oprema sa više senzora i procesirani podaci stvaraju višedimenzionalnu sliku predmeta. Visoka preciznost lasera omogućuje visoku rezoluciju dobivenih podataka. Budući da spada u red optičkih senzora, na ovu vrstu prikupljanja podataka utječu vremenske prilike kao što su kiša ili snijeg, te zahtijeva više procesorske snage u odnosu na prethodne metode. e) Računalni vid Koristeći video kameru prikuplja se vizualni zapis okoline. Dva pristupa obradi slike su algoritmi koji prepoznaju pješake temeljem specifičnosti ljudskog hoda, te temeljem obrisa ljudske siluete. Prvi pristup u nizu slika traži značajke ritmičkog kretanja karakterističnog za hod pješaka. Mane ovog pristupa su nemogućnost detekcije statičnih osoba ili osoba koje se kreću na netipičan način primjerice skaču. Nadalje, potrebna je vidljivost nogu i stopala, budući da se detekcija najčešće vrši na temelju njihovih kretnji. Potrebno je duže vrijeme procesiranja jer se koristi niz uzastopnih slika, što odgađa prepoznavanje do obrade zadnje slike. U nastavku će više biti rečeno o pristupu koji se temelji na karakterističnom obliku pješaka. 1.2 Izazovi prepoznavanja pješaka temeljenog na obliku siluete Privlačna prednost ovog smjera obrade je mogućnost detekcije pješaka u pokretu i statičkih pješaka. Potrebno je pronaći i kodirati ona svojstva oblika koja se pojavljuju kod svih ili velike većine pješaka, vodeći računa o računalnoj snazi potrebnoj da se prepoznavanje izvrši. Oblici koje treba detektirati mogu se uvelike razlikovati u ovisnosti o stavu pješaka, položaju ruku, odjeći i osvjetljenju. Raznolikost oblika koje treba detektirati pridonosi 3
7 povećanju neispravno pozitivnih detekcija. Također, budući da su svojstva raspršena po velikom dijelu slike i teško ih je jednostavno opisati, ova vrsta prepoznavanjaa donosi velik broj značajki koje treba ispitati, što direktno uzrokuje potrebu za većom računalnom snagom Raznolikost oblika pješaka Teško je pronaći i opisati jedinstvenu osobinu koju posjeduju svi pješaci. Ljudi mogu imati različite boje kože ili odjevnih predmeta. Pažnja istraživača stoga je usmjerena na oblik siluete osobe. Teškoće koje se javljaju promatrajući oblik mogu donijeti objekti kao što su torbe ili druge stvari koje osoba nosi. No i bez dodatnih objekata, ljudsko tijelo dolazi u velikom mnoštvu oblika: od pretilih do mršavih, visokih i niskih. Slika 1. Tri različita pješaka različitih oblika Raznolikost veličina Uz odstupanja zbog visine osobe, osoba može biti manja jer je udaljena od kamere. Kako se pokazalo teškim kodirati promjene veličine pri treniranju prepoznavanja, većina algoritama koristi pristup da pri treniranju koristi fiksnu veličinu, a pri detekciji skalira sliku po potrebi. Pri tome je lakše sliku skalirati na manju veličinu, a problem može nastati ako je slika pješaka manja od trenirane veličine, kada je potrebno skaliranje slike naviše. Slika 2. Različite veličine pješaka 4
8 Položaji tijela Dodatni izazov predstavlja različitost položaja tijela, ruku i nogu. U idealnom slučaju objektu se dozvoljava samo jedan standardni položaj. Jasno je da u primjenama, osobito u prometu ili nadgledanju ovakva restrikcija nije izvediva ni moguća. Slika 3. Pješaci s različitim položajima tijela Osvjetljenje Osvjetljenje predstavlja osobiti izazov pri detekciji u prometu, gdje je moguće da je detektor pokretan i time prolazi kroz različite zone osvijetljenosti. Pri tome valja voditi računa ne samo o mijenjanju osvjetljenja na cijeloj slici, već i na to da se osvjetljenje može promijeniti i na dijelu slike. Potrebna je normalizacija slike koja će uvesti što manju osjetljivost i na lokalne i na globalne (preko cijele slike) varijacije svjetla. Slika 4. Različita osvijetljenost pješaka Mijenjanje točke gledišta Za sustave koji prate pješaka bitno je imati što precizniju informaciju i kada se pješak i/ili kamera (koja se možda nalazi u automobilu ) gibaju. Ovaj problem veže se na prijašnje probleme skaliranja, primjerice kada pješak dolazi prema kameri, te problema položaja tijela, ako se pješak rotira u odnosu na kameru. 5
9 Slika 5. Različite točke gledišta pješaka Varijacije pozadine Pozadina može biti slična pješaku i na taj način detektirana kao dio njegovog oblika, deformirajući ga. Kada je kamera stacionirana, pozadina se može učiti i tako učinkovito eliminirati. Iz već rečenog je jasno da se na navedeno u većini primjena ne može računati. U primjeni se teškim pokazuju pozadine s puno detalja. Slika 6. Različite pozadine pješaka 1.3 Povezani radovi Jedan od najpoznatijih radova ovog područja je (Viola, 2001). Viola i Jones detektiraju lice koristeći algoritam učenja baziran na AdaBoostu kako bi izdvojili kritične značajke i ostvarili brzo procesiranje. Ovdje se ukratko predstavljaju značajke koje koriste Viola i Jones, kako bi se opisala alternativa značajkama korištenim u ovom radu. Najjednostavniji način provjere slike vodio bi zacijelo provjeri vrijednosti pojedinih točaka slike. Ovaj pristup ima više značajnih nedostataka: čak i unutar normaliziranih slika postoje značajna odstupanja u položaju pojedinih objekata. Glava osobe može biti pomaknuta više u neku stranu, pa će tako na jednoj slici isti piksel biti dio glave osobe, a na drugoj opisivati pozadinu. Druga značajna mana odnosi se na razliku u intenzitetu. Istu osobu u različitim uvjetima osvjetljenja opisivat će slike bitno različitih intenziteta tako da 6

10 je teško postaviti odlučan uvjet na intenzitet piksela. O ovim problemima bit će više riječi u nastavku. Jedno od rješenja nude Viola i Jones u svom originalnom radu. Značajke koje se koriste za detekciju su razlike u površinama pravokutnika. Slika 7 ilustrira tipove značajki. Vrijednost svake značajke je razlika između zatamnjenog i svijetlog dijela pravokutnika. Tako se iznos značajke tipa A dobiva tako da se zbroje intenziteti točaka tamnog dijela, te se od tog iznosa oduzme zbroj točaka svijetlog dijela. Slika 7. Ilustracija tipova značajki Slika 8 prikazuje primjenu značajki. Slike 7 i 8 preuzete su iz rada (Viola, 2001). Dio pravokutnika koji pada na čelo detektiranog lica ima manje intenzitete točaka od dijela pravokutnika koji pripada očima. Ova značajka uspješno opisuje svojstvo ljudskog lica da su je područje očiju tamnije od područja čela. Odgovor na postavljene probleme pred odabrane značajke Slika 8. Pronađene značajke autori su riješili na sljedeći način: značajke koje oni koriste su delokalizirane i temelje se na razlici zbroja intenziteta. Time što pravokutnici pokrivaju puno veću površinu od pojedinog piksela dobiva se na fleksibilnosti. Primjerom iz detekcije osoba, čak i ako je glava osobe koju želimo detektirati pomaknuta u odnosu na standardnu poziciju, pravokutnici mogu obuhvatiti dovoljno veliko područje, tako da se ona ipak pronađe u značajki. Drugi izazov koji se tiče razlika u osvjetljenju ove značajke rješavaju time što se promatra razlika u zbrojevima intenziteta, a ne same intenzitete. Primjerom iz detekcije lica, čak i ako je lice osvijetljeno ili u sjeni, regija očiju će biti tamnija od regije lica. Predstavljene značajke mogu se metodom integralne slike izračunati u konstantnom vremenu. Metoda će detaljnije biti objašnjena u narednim poglavljima. Nedostatak značajki je njihov fiksni pravokutni oblik zahtjevan zbog brzog izračunavanja. Teško se kodiraju kose površine ili eliptični oblici. U prilagodbi vlastitog klasičnog rada za detekciju pješaka (Viola, 2005), Viola i Jones uz navedene značajke koriste i uzorke kretanja. Rad je namijenjen detekciji pješaka za 7
11 potrebe nadgledanja i prilagođen je niskim rezolucijama pripadajućih kamera. Ključna novost je prilagodba postojećih značajki za detekciju pokreta. Za svaku sliku računa se pomak u odnosu na prethodnu u 4 glavna smjera: gore (G), lijevo (L), dole (D) i desno (R), što zajedno sa slikom koju dobijemo jednostavnim oduzimanjem trenutne i prethodne slike (TP) čini 5 slika. Tako se slika G dobije da se svi pikseli trenutne slike pomaknu za jedan piksel prema gore i oduzmu od prošle slike. Ovako se oponaša moguće kretanje pješaka prema gore u slici: ako se pješak kreće prema gore razlike će biti manje nego ako se, primjerice, kreće prema dole. Očekuje se da će dobivene slike biti tamne, osim na dijelovima gdje postoji pomak. Nad postojećim slikama uvode se tri nove vrste značajki: 1) Značajke koje zapisuju razliku u pravokutnicima slike TP i svake od slika G, L, D i R. 2) Značajke koje računaju iznose pravokutnika u svakoj od slika TP, G, L, D i R. 3) Značajke koje računaju razlike između dva pravokutnika na slici, gdje je slika jedna od G, L, D ili R. Razlika značajki 2) i 3) je u tome što značajka 2) u obzir uzima zbroj intenziteta unutar pravokutnika, dok značajka 3) tom zbroju oduzima intenzitete drugog pravokutnika. Ovom relativno jednostavnom pretragom proširila se metoda osnovnog rada na kretanje pješaka, pa tako ovaj rad obuhvaća i statičke i dinamičke informacije. Radom (Viola, 2005) postignuto je prepoznavanje od 90% pješaka uz red veličine krivo pozitivnih detekcija Prosječno vrijeme obrade slike je 0.25s za sliku veličine 360x240, na računalu brzine 2.8GHz. Istaknut je rad (Papageorgiou, 99), gdje autori koriste računalni vid za ostvarivanje visokog stupnja detekcije uz brzinu obrade od 10Hz. I ovdje se koriste iste značajke kao i u prethodnim radovima, ali algoritam učenja nije više AdaBoost, već SVM (eng. Support vector machine ) klasifikacija. Postiže se postotak od oko 90% detekcije pješaka uz 10-4 lažno pozitivnih detekcija. Sustav je integriran u testna vozila kroz projekt poznat kao DaimlerChrysler Urban Traffic Assistant (UTA). 8

12 2 Izrada klasifikatora U ovom poglavlju opisuje se teorijska podloga za treniranje klasifikatora. Dva su ključna pitanja pitanja pri dizajnu i izradi klasifikatora: kako odabrati značajke? Kako iz pojedinačnih značajki napraviti klasifikator? Tragom ovih pitanja, izrada klasifikatora opisuje se u više dijelova. Prvi dio obrađuje odabir značajki, te objašnjava zašto se koriste dvije vrste značajki. Drugi dio posvećen je algoritmu učenja. 2.1 Značajke Kao što je do sada rečeno u uvodu, posljednjih godina najpopularnije značajke temelje se na sumama intenziteta pravokutnika. Ove značajke su poznate i kao Haarove značajke. Pristup koji se radom istražuje je prepoznavanje pješaka na temelju oblika. Nastojao se odabrati takav pristup značajkama koji će omogućiti opis oblika pješaka uz što manje računanja. Ovaj rad otklanja se od većine ostalih koristeći jednostavne značajke temeljene na intenzitetima derivacija, te stvarajući iz njih nove značajke. Kako se u radu koriste dvije vrste značajki, korisno ih je na početku razlaganja različito imenovati. Značajke niže razine nazvane su pokazivači (eng. pointers), zato što za određenu točku pokazuju iznos derivacije slike. Druga vrsta značajki nazvana je obris (eng. shapelet), jer kombinira značajke niže razine, pokazivače, kako bi opisala komadić oblika pješaka. Objašnjenje značajki lakše je razumljivo kada je poznato što se s njima želi postići. Krajnji rezultat je klasifikator vizualiziran na slici 9. Slika je preuzeta iz (Sabzmeydani, 2007). Tamna područja na slici opisuju karakterističan izgled pješaka, naučen od strane sustava. Testiranje dijela slike (prozora) koje odgovara na pitanje da li je prisutan pješak teče ovako: na zatamnjenim područjima provjeravaju se intenziteti piksela. Za svaki piksel postavlja se pitanje: da li je intenzitet piksela testirane slike veći od granice postavljene za taj piksel. Ukoliko je odgovor za dovoljan broj piksela potvrdan, slika se klasificira kao pješak. Ovo je pojednostavljen prikaz testiranja, koje će detaljnije biti objašnjeno u narednim poglavljima. Slika 9 Ilustracija klasifikatora 9
13 2.1.1 Temeljne značajke: pokazivači Proces računanja temeljnih značajki teče kako slijedi: 1) Prvo se slika prebaci u crno-bijeli (eng. grayscale) oblik, koji ćemo zapisati kao G. 2) Računa se promjena piksela u 4 smjera. Nastale slike u ostatku teks ta navode se kao derivacije slike G. Primjerice, za smjer 1 koji je pod kutem od 0 o, računa se nova slika D 1 1, tako da je: D 1 (x,y) = G(x+ +1,y)-G(x-1,y) (1) Izrazi za ostale smjerove su kako slijedi: D 2 (x,y) = G(x+ +1,y-1)-G(x-1,y+1) (2) D 3 (x,y) = G(x,y-1)-G(x,y+1) (3) D 4 (x,y) = G(x-1,y-1)-G(x+1,y+1) (4) 3) Za svaki piksel pojedine derivacije računa se nova vrijednost tako da se zbroji okolnih 25 piksela, i rezultat podjeli s 25. U praksi se pokazalo da ovaj postupak proširi rubove dobivene prethodnim postupkom. Kako će se kasnije pokazati, ovo je veoma važno za rezultate klasifikatora. Ovim postupkom nastoji se izbjeći prva prepreka pred značajkama koje rade s pikselima: manje varijacije u normaliziranim Slika 10. Smjerovi u kojima se računaju derivacije slike Slika 11. Označen središnji piksel i susjedi koji utječu na njegovu novu vrijednost slikama. O ovome je više rečeno u uvodu, u dijelu o odabiru značajki za rad (Viola, 2001). 4) Provodi se postupak lokalizirane normalizacije. Intenziteti se normaliziraju s obzirom na lokalne susjede, čime se prevladava druga zamjerka značajki temeljenih na pikselima: razlike u osvjetljenju. Ako je jedan dio pješaka bolje osvijetljen, a drugi primjerice u sjeni, ovim postupkom taj će se efekt umanjiti. Kasnije je pokazano kako normalizacija utječe na rezultate algoritma. Normalizacija se provodi tako da se svi pikseli pripadnici iste regije pomnože s odgovarajućom konstantom. Točnije, prema formuli: 10
14 (5) Izbor veličine regije opisan je kasnije, pri opisu ostalih parametara algoritma. Sve regije su iste veličine i oblika kvadrata. Pri računanju zbroja kvadrata intenziteta u pikselima regije (suma u nazivniku formule 5) koristi se metoda popularizirana u (Viola, 2001) nazvana integralna slika. Ideja ove metode je da se za svaki piksel (x,y) pamti suma intenziteta u površini pravokutnika (0,0)-(x,y). Tu sumu nazivamo integralom I(x,y). Ove vrijednosti koriste se kako bi se intenziteti na površini bilo kojeg pravokutnika na slici dobili u konstantnom vremenu. Površina pravokutnika D na slici 12 je I 4 +I 1 -I 2 -I 3. Slika 12. Integralna slika Slika 13 prikazuje međukorake pri stvaranju normalizirane derivacije. Za svaku sliku stvaraju se 4 takve derivacije koje odgovaraju 4 osnovna smjera navedena u slici. Slika 13. Slike u postupku stvaranja normalizirane derivacije Pokazivač je jednostavna značajka koja se sastoji od pozicije, smjera, iznosa ( ) i predznaka ( ). Za svoju poziciju, pokazivač je značajka koja kaže da je slika vjerojatnije pješak, ako je njena normalizirana derivacija D d (x,y) na toj poziciji veća od. Predznak 11
15 pokazivača određuje znak usporedbe, pa u ovisnosti o pokazivač može biti jednak tvrdnji da je iznos derivacije manji od. Može se zaključiti da je binarna varijabla.,,,, š (6) Ovdje se definira svojstvo da je slika istinita prema pokazivaču ako i samo ako je pokazivač ispravno klasificira. Pokazivač ispravno klasificira sliku ako vrijedi relacija (7). Ako slika nije istinita za pokazivač, tada je neistinita u odnosu na njega.,, 1, (7) 0 č Značajke druge razine: obrisi Značajke druge razine definiraju se kao niz temeljnih značajki, tako da je svakoj nižoj značajki pridružena određena snaga. Snaga pokazivača brojčano opisuje koliko je pokazivač dobar u razdvajanju dviju klasa: pješaka i nepješaka. Što je veća snaga pokazivača, više slika je istinito, a manje neistinito za taj pokazivač. Snagu pokazivača određujemo AdaBoost algoritmom. Budući da jedan pokazivač izdvaja tako malo informacija iz slike, ne može se očekivati da će dobro klasificirati slike. Kasnije će se, u dijelu o AdaBoost algoritmu, pokazati da dovoljnim da pokazivači klasificiraju slike tek nešto bolje od nasumične klasifikacije, primjerice 51% u odnosu na slučajnih 50%. Zato se pokazivači grupiraju u obris, koji iz određene podslike izdvaja pokazivače koji najbolje klasificiraju slike. Obrisi opisuju veću količinu lokalnih informacija i postižu bolje rezultate klasifikacije. Neka je snaga pokazivača. Klasifikator pojedinog obrisa ima formulu: T H x 1 0 (8) 0 inače Koje pokazivače obrisi mogu uključiti određeno je njihovim podprozorom. Pri treniranju, slika se dijeli na podprozore veličine 5x5, 10x10 ili 15x15. Svaki obris pripada jednom podprozoru i samo iz njega uključuje pokazivače. U segmentaciji gdje je prozor veličine 5x5, mogući broj pokazivača je 5x5x4, po jedan za svaki smjer (4 smjera, po jedan za svaku derivaciju). Jasno je da svi pokazivači neće imati jednaku snagu, pa se u obris uključuju 12

16 samo oni pokazivači s najvećom snagom. Broj pokazivača parametar je algoritma, a implementacija u (Sabzmeydani, 2007) savjetuje odabir najboljih pokazivača. Fleksibilnija implementacija dopušta onim obrisima koji imaju pokazivače velike snage da uključe više pokazivača. Slika 14. Prikaz slike, jednog obrisa i jednog njegovog pokazivača Zašto konstruirati novu vrstu značajki? Obrisi ne crpe nove informacije sa slike, već organiziraju i evaluiraju informacije pohranjene u pokazivačima. Jednostavan pristup bio bi algoritam učenja upogoniti sa svim pokazivačima, te na taj način izabrati najbolje. Kao što se navodi u (Sabzmeydani, 2007), protiv ovog pristupa postoje dvije ozbiljne zapreke. Prva se odnosi na vremensku složenost takvog rješenja. Druga i važnija zapreka odnosi se na algoritam učenja. AdaBoost iz podataka upotrebljenih za trening izvlači minimalnu količinu informacija da bi se izvršila klasifikacija. Mnoge značajke koje su na treningu prosječne ili male važnosti mogu tako biti gotovo zanemarene, a u praksi se pokazuje da na testnom skupu one mogu odigrati bitnu ulogu. AdaBoost bi se mogao koncentrirati na mali broj značajki koje dobro klasificiraju podatke za treniranje i pri tom zapostaviti velik broj drugih značajki koje su bitne za testni skup. Ovim pristupom iz svakog podprozora se izvlači određen broj značajki, pa se nameće globalni pristup: ne može se dogoditi da konačne značajke budu usko lokalizirane na nekoliko podprozora. Kako svi podprozori ne sadrže jednako vrijedne informacije, drugim krugom AdaBoosta ocjenjuju se obrisi, kako bi se pronašla ona lokalna područja koja najbolje opisuju obrise pješaka. Pristup se može sažeti ovako: značajke se crpe iz cijele slike, a potom veća težina daje onima koje su korisnije. 13
17 Konačni klasifikator dobije se tako da svaki obris daje brojčanu ocjenu slike pozitivan broj znači da je slika pješak, a negativni da nije. Ocjena obrisa, osim što govori o klasifikaciji slike, nosi i ocjenu sigurnosti obrisa, budući da veći broj znači veću sigurnost da je slika pješak. Ocjena obrisa množi se njegovom težinom, pa se konačna odluka donosi temeljem težinskog glasovanja obrisa. 2.2 AdaBoost Problem detekcije pješaka svodi se na odgovor na pitanje: da li je na zadanoj slici pješak? Programi koji taj problem rješavaju su klasifikatori koji svaku sliku svrstavaju u jednu od dvije kategorije: pješak ili nepješak. Klasifikator je funkcija koja ulaze svrstava u klase,. Iako općenito može biti više klasa kao izlaz funkcije, ovdje se razmatraju klasifikatori s dva izlaza, obično predstavljena s 1, 1. Također, razmatrani klasifikatori su linearni. Dobar uvod u ovo područje predstavlja (Polikar, 2006). Ovdje je dan uvod u klasifikatore u kratkim crtama, te poseban osvrt na AdaBoost. Riječi klasifikator i hipoteza ponekad se koriste izmjenično, te u daljnjem tekstu označavaju iste pojmove. Jednostavan primjer klasifikacije ilustrira slika 15. Potrebno je pronaći liniju koji najbolje razdvaja dva skupa koji se preklapaju. Rješenja s desne strane prikazuju neke od mogućih klasifikatora: linearne i nelinearne. Slika 15. Testni skup i dva moguća klasifikatora nelinearni i linearni Moderna povijest klasifikatora počinje radom (Dasarthy, 1979), koji razmatra podjelu prostora značajki koristeći dva ili više klasifikatora. Hansen i Salamon su u (Hansen, 1990) pokazali da se izvedba neuronskih mreža može poboljšati koristeći klasifikatore slično konfiguriranih neuronskih mreža. Iste godine je Schapire radom (Schapire, 1990) razradio 14

.")

18 teoretske osnove izrade snažnog klasifikatora iz niza slabijih, čime je postavio teoretske osnove AdaBoosta. AdaBoost je općenit algoritam strojnog učenja. Cilj je algoritma napraviti takav klasifikator koji će osigurati najbolje razdvajanje dvije klasa, uz minimalan račun. Od 1997, kada su ga Freund i Schapire objavili, ovaj algoritam privukao je osobito veliku pažnju istraživača. Slika 16. Prikaz klasifikacije točaka AdaBoost algoritmom za 1, 2 i 40 pravaca Princip rada jednostavno ilustrira primjer autora algoritma, naveden u (Freund, 1999). Kladioničar na utrke konja nada se postići što veći prihod, pa odluči napraviti program koji će točno predviđati pobjednika utrke na temelju dostupnih informacija: broj utrka u kojima je konj prije pobjeđivao, koeficijenti drugih kladionica itd. Pri stvaranju programa, kladioničar pita stručnjake koji se uspješno klade da mu objasne svoju strategiju. Stručnjaci ne mogu ponuditi jednu strategiju koja bi uvijek bila točna, ali opremljeni s dovoljnim brojem podataka mogu odlučiti na kojeg konja će se kladiti, te odgovoriti zašto baš na njega: Kladi se na konja koji je u posljednje vrijeme osvojio najviše utrka ili Kladi se na konja koji ima najmanji koeficijent. Iako je nevjerojatno da će takav odgovor poslužiti predviđanju svih utrka, razumno je pretpostaviti da će takav naputak poslužiti bolje od nasumičnog odabira. Velikim brojem podataka kladioničar može prikupiti proizvoljan broj savjeta. Da bi iskoristio ove naputke pri stvaranju svog programa, kladioničar želi odgovoriti na dva pitanja: Koji savjeti su dobri, a koji ne? Kladioničar za svoju bazu utrka ima i konačne ishode, te može provjeriti koliko je pojedini savjet dobar uzimajući u obzir ukupno sve utrke. 15
19 Kako kombinirati savjete u jedan sustav odlučivanja visoke preciznosti? Kladioničar se odlučuje koristiti AdaBoost. AdaBoost pripada generičkoj skupini algoritama koji stvaraju precizno pravilo predviđanja (klasifikacije) koristeći više hipoteza malog stupnja preciznosti. U navedenom primjeru, AdaBoost će ispitati kvalitetu svakog savjeta koji je kladioničar prikupio, te svakom savjetu odrediti težinu. ln (9) Težina svakog savjeta određuje se u skladu s formulom (9), gdje je greška slabe hipoteze (savjeta). Konačno pravilo odlučivanja uzet će u obzir sve savjete u skladu s njihovom težinom. Detalji i numerički odnosi se preskaču kako bi se algoritam prikazao što je jednostavnije moguće. Pseudokod algoritma ja kako slijedi:inicijaliziraj skup greški D 1 (i) = 1/m, gdje je m broj testnih podataka Za t od 1 do T: Napravi slabi klasifikator nad testnim podacima, uzimajući u obzir greške D t Izračunaj grešku koju klasifikator radi Pridijeli klasifikatoru težinu u ovisnosti o grešci za manju grešku pridijeli veću težinu, prema formuli (9) Izračunaj novu distribuciju grešaka D t+1, tako da o Testnim primjerima gdje trenutni klasifikator griješi povećaš težinu za faktor o Testnim primjerima koje klasifikator dobro klasificira smanjiš težinu za faktor Konačna hipoteza je suma ishoda svih slabih klasifikatora pomnoženih s vlastitom težinom 16
20 Ključno svojstvo algoritma je održavanje distribucije pogrešaka, te stvaranje novih klasifikatora u skladu s ovom distribucijom. Primjerom se ovo može pokazati ilustrirati na sljedeći način: one utrke za koje savjeti stručnjaka točno predviđaju ishod u idućem koraku će dobiti manju težinu, a one gdje je ishod netočno prognoziran veću težinu. To će prisiliti idući klasifikator da se usmjeri prema onim testnim primjerima koje je prethodnik loše klasificirao. Slika 17. Ilustracija AdaBoost algoritma primjerom Slika 17 ilustrira detalje algoritma. Kladioničar je prikupio 3 savjeta: prvi savjet točno predviđa ishode prve i druge trke, a netočno ishod treće trke. Drugi savjet je identičan prvom, a treći točno savjetuje za posljednje dvije trke. Pretpostavimo za svrhe primjera da se radi binarnoj klasifikaciji, pa se odluka donosi samo između dva konja. U tom slučaju, svi klasifikatori imaju točnost od 2/3. Budući da su samo dva ishoda, ako su oba približno jednako vjerojatna točnost nasumičnog klasifikatora je 1/2. Algoritam teče kako slijedi: 1. Klasifikator ima jednoliku distribuciju grešaka, D i = 1/3. Njegove sposobnosti predviđanja su bolje od nasumičnog pogađanja i pridjeljuje mu se težina α=0.35. U skladu s predviđanjima podešava se distribucija grešaka: utrke gdje 17
21 je točno prognoziran ishod dobile su manju težinu, a utrka u kojoj je ishod krivo prognoziran veću težinu. 2. Klasifikator više nema jednoliku distribuciju grešaka. Savjet koji je kladioničar dobio dobar je za prve dvije trke, ali greška koju AdaBoost računa je D 3 =0.5, jer je to koeficijent treće trke. Greška 0.5 govori algoritmu da se ništa novo nije saznalo (savjet je beskoristan), pa mu se pridjeljuje težina α =0.0. Klasifikator se zanemaruje, pa se tako ni greške ne mijenjaju. 3. Točno se prognozira ishod posljednje dvije trke. Rezultat je težina od α =0.55 i nova distribucija grešaka. Iz primjera je vidljivo da su u koraku t AdaBoosta sve informacije o prethodnim hipotezama zapisane u distribuciji grešaka D Teoretska podloga AdaBoosta Freund i Schapire u radu (Freund, 1997) pokazali su da je greška nad treniranim podacima ograničena sljedećim izrazom: (10) Pri tome je, pa je mjera za to koliko je slabi klasifikator bolji od nasumičnog pogađanja. Iz izraza (9) slijedi da greška nad treniranim podacima pada eksponencijalno ako su generirane hipoteze bolje od nasumičnog pogađanja. Greška nad testnim podacima ovisi o tome koliko su testni podaci slični podacima korištenim pri treniranju. 18
22 Slika 18. Pad granice AdaBoost greske brojem hipoteza za konstantno 0.01 Složenost AdaBoost algoritma sadržana je u stvaranju slabih klasifikatora na temelju prošlih grešaka. Ako se pri stvaranju klasifikatora svaki testni podatak razmatra konstantno vrijeme O(1), tada je vremenska složenost algoritma O(TM), gdje je T broj slabih klasifikatora, a M broj primjera nad kojima se vrši treniranje. Prostorna složenost samog algoritma je O(M), budući da sam algoritam zahtijeva tek niz duljine M za distribuciju grešaka Implementacija AdaBoosta AdaBoost je središnji dio ovog rada. Pri treniranju završnog klasifikatora koristi se dva puta: prvi put kako bi se ocijenili pokazivači unutar jednog podprozora i stvorio efikasan obris, a idući put kako bi se usporedili obrisi i dobio završni klasifikator. Sam je tok algoritma generički, pa stoga jednak u oba prolaza. Detaljnije će biti objašnjeno stvaranje slabih hipoteza. 19
23 Slika 19. Postupci izrade klasifikatora Označimo veličinu podprozora za stvaranje obrisa sa L. Već je rečeno da se u jednom podprozoru nalazi L*L*4 pokazivača. Primjenjuje se algoritam učenja kako bi se ocijenili i izdvojili oni pokazivači koji najbolje razdvajaju dva skupa pješaka i nepješaka. Stvaranje slabih hipoteza jednako je odabiru smjera i iznosa pokazivača. Iznos pokazivača je vrijednost intenziteta slike, pa poprima vrijednosti iz skupa [0,255]. Ukupan broj pokazivača koje treba obraditi je 128*64*4 = 32768, gdje su 128 i 64 visina i širina slike. Prva implementacija mogla bi biti: za moguću vrijednost pokazivača provjeri koliko slika je krivo klasificirano, što bi značilo da je složenost O(I*M). I je u ovom slučaju 256, a M broj test primjera. Broj test primjera kojima se trenira klasifikator bit će reda veličine 1000, pa je tada ukupan broj operacija 32768*256* Ipak, primjenom odgovarajućeg postupka za odabir iznosa pokazivača broj operacija značajno se skraćuje. Problem se može definirati kako slijedi: definirajmo dva niza duljina M p i M N, P i N, koji oba sadrže elemente skupa I [0,255]. P je duljine M p, a N duljine M N. Ako je slika m pješak i na lokaciji D d (x,y) pokazivača ima piksel intenziteta z, tada niz P ima na lokaciji m zapisano z. Ekvivalentno se definira i niz N za negativne slike. Definirajmo dva dodatna 20
24 niza E p i E N koji sadrže težinske koeficijente za svaki element nizova P i N. Cilj je pronaći takvu granicu za koju vrijedi da minimizira grešku zadanu izrazom: M [ ] N[i] M [ ] P[i] 0 č 0 č (11) Grafički se rečeno može predstaviti slikom 20. Niz P sadrži informaciju o pozicijama pozitivnih elemenata, a niz E p sadrži koeficijente. Treba pronaći granicu tako da zbroj pozitivnih koeficijenata iznad granice i zbroj negativnih koeficijenata ispod granice budu što manji. U primjeru na slici ukupna greška iznosi , i to je najmanja moguća greška. Slika 20. Odabir praga razdvajanja dvaju skupova Granica se pronalazi tako da za svaki interval zbroji pozitivne elemente iznad granice i negativne elemente ispod granice. Ključno je da se ovi zbrojevi mogu unaprijed izračunati bez povećanja složenosti, pa se svaka moguća pozicija granice ispituje u konstantnom vremenu. Ukupna složenost općenito je jednaka broju mogućih intervala za granicu, što je jednako broju slika s kojima se trenira algoritam, M. Algoritam i složenost jednaki su kod stvaranja pokazivača i kod stvaranja obrisa. 21
25 2.3 Programska implementacija Prioriteti dizajna aplikacije bili su olakšati testiranje i ispravljanje grešaka, te napraviti skalabilan program koji jednako lako radi s velikim i malim brojem slika. Kao arhitektura odabrana je objektno-orijentirano programiranje. Za izbor programskog jezika razmatrane su tri mogućnosti: C, C++ i Java. Iako nije moguće mjeriti brzinu ili memorijsko zauzeće samog programskog jezika, već samo brzinu i memorijske potrebe neke od njegovih implementacija, u (Fulgham, 2008) se može pronaći niz testova koji sugeriraju sljedeće: C je neznatno brži od C++-a (do faktora 1.5) te zahtijeva nešto manje memorije. C++ je brži od Jave (za faktor ), ali Java zahtijeva i do red veličine više memorije. Kako je memorija značajan čimbenik u treniranju aplikacije, budući da se sve trenirane slike zajedno sa svojim derivacijama nalaze u memoriji, odabran je programski jezik C++. Da bi se ostvarila skalabilnost i prilagodljivost programa koriste se generičke C++ klase: STL (eng. Standard Template Library). Od generičkih klasa STL-a izdvaja se klasa vector. Klasa vector djeluje kao omotač oko polja i omogućuje jednostavno alociranje prostora tokom izvođenja, pa se njegova veličina može dinamički prilagođavati broju elemenata. Vector se često koristi, a kao primjer generalizacije koja je s njim moguća izdvaja se primjer parametriranja smjerova derivacije, o čemu je već bilo riječi. Standardna implementacija koristi 4 smjera derivacija opisanih na slici 10. Za dodavanje novog smjera derivacije u program dovoljno je dodati tek jedan redak u odgovarajući vector koji opisuje novi smjer derivacije. Za rad sa slikama koristi se biblioteka OpenCV. Njen kod napisan je u C-u, pa se lako može uključiti u C++ projekt. OpenCV omogućuje jednostavno učitavanje slika, pretvaranje u crno-bijelu sliku, te očitavanje piksela. Druge naprednije mogućnosti se ne koriste, već se implementiraju samostalno. Nakon treniranja klasifikator se zapisuje u XML dokument. Ovaj XML dokument dovoljno je pri svakom idućem testiranju učitati, bez potrebe za novim treniranjem klasifikatora. Osim što je na taj način lako učitati klasifikator za potrebe testiranja, XML dokument se pokazao korisnim u pronalaženju grešaka pri kodiranju. 22
26 <classifier>... <shapelet begx="80" begy="60" endx="85" endy="65" size="10" area="5" threshold=" " power=" " error=" " > <pointer x="83" y="60" direction="2" threshold="6" positive="0" error=" " power=" " /> <pointer x="82" y="60" direction="1" threshold="0" positive="1" error=" " power=" " /> <pointer x="82" y="61" direction="3" threshold="10" positive="1" error=" " power=" " />... </shapelet>... </classifier> Slika 21. XML sadržaj klasifikatora 23
27 3 Testiranje i rezultati Kao skup podataka za treniranje klasifikatora odabrana je baza podataka pješaka MITpedestrian. Baza sadrži 924 slike pješaka u ppm (eng. portable pixmap format) formatu. Kao negativni primjeri poslužile su slike baze INRIA. Klasifikator sliku ocjenjuje tako da pozove na glasanje svaki obris i njegov glas uzme s određenom težinom. Pri tom obris ne ocjenjuje samo binarno, kao pješak ili nepješak, već brojčano: što je veći broj ocjene to je obris sigurniji da je na slici pješak. Taj broj množi se s težinom (snagom) koju obris ima. Konačna ocjena klasifikatora je broj dobiven zbrajanjem ocjena obrisa. Parametar koji se može mijenjati je prag detekcije: ako se prag postavi visoko tada je potrebna visoka ocjena za sliku da bi ona bila pješak. Suprotno, ako je prag nizak tada će većina pješaka sakupiti dovoljnu ocjenu klasifikatora, ali će dovoljnu ocjenu postići i određen broj nepješaka. Postignuto je prepoznavanje s greškom reda veličine 1% za pješake i nepješake. Nad testiranim podacima klasifikacije prikazane na slici, pješaci se prepoznaju u 97% posto slučajeva, kada se nepješaci prepoznaju u 96% slučajeva. ROC (eng. Receiver Operating Characteristic ) krivulja pokazuje odnos detektiranih pješaka i nepješaka u postotcima. Krivulja je dobivena učenjem nad 200 slika pješaka i 600 slika nepješaka, veličine 128x64. Testni podaci su 200 pješaka i 800 nepješaka. Rezultati su usporedivi s rezultatima rada (Sabzmeydani, 2007), koji koristi jednake značajke. Detekcija pješaka [%] ROC krivulja Detekcija nepješaka [%] Slika 22. Konačna ROC krivulja treniranog klasifikatora, ovisno o pragu klasifikacije 24
 veličine 128x64, da li je u njoj pješak?")
28 Važno je napraviti razliku između prepoznavanja pješaka u prozoru i slici. Razliku ilustriraju slike 23 i 24. Prepoznati pješaka u prozoru znači odgovoriti na pitanje: za podsliku (prozor) veličine 128x64, da li je u njoj pješak? Prepoznavanjem pješaka na slici ovdje podrazumijevamo njihovu detekciju kao što je označeno na slici 24. Takva detekcija koristi detekciju pješaka u prozorima, kako je objašnjeno kasnije. Slika 23. Prozor Slika 24. Detekcija pješaka na slici Na rezultate klasificiranja utječu parametri algoritma. Njihovim mijenjanjem podešavaju se rezultati unutar istog reda veličine. Pri podešavanju algoritma koristi se uvijek isti skup testnih slika koji se sastoji od 100 slika pješaka i 200 slika nepješaka. Ovaj broj slika nije dovoljan za konačno i precizno opisivanje rezultata klasifikatora, već se koristi kao pokazatelj pri mijenjanju parametara algoritma. Razumno je pretpostaviti da će klasifikator koji bolje klasificira ovaj testni skup bolje klasificirati i veći skup. Izdvojeno je 7 najvažnijih parametara kojima se algoritam fino podešava. Potpuna pretraga za njihovom najboljom kombinacijom računalno je neizvediva. Napredniji pristupi vodili bi genetskom algoritmu ili sličnoj metodi optimizacije. Budući da se podešavanjem parametara ne postiže poboljšanje točnosti za red veličine, ovakva potraga ocijenjena je neisplativom. Parametrizacija se vrši pohlepnim algoritmom (eng. greedy algorithm): prvo se odredi najbolja vrijednost za jedan parametar, dok se drugi ne 25
29 mijenjaju. Uzima se najbolja vrijednost od testiranih i prelazi na idući parametar, te se postupak ponavlja. 3.1 Parametri Najvažniji parametar za brzinu i preciznost treniranja je broj pozitivnih (pješaka) i negativnih slika nad kojima se klasifikator trenira. Rezultati su prikazani na slici 25. Klasifikator već na uzorku od 10 pozitivnih i 40 negativnih slika postiže razinu prepoznavanja nepješaka od 94%, uz 91% detektiranih pješaka. Detektirani pješaci [%] Detektirani nepješaci [%] Trening 100/ Trening 25/ Trening 10/ Slika 25. ROC krivulje u ovisnosti o broju slika za treniranje klasifikatora Prag derivacije je prag koji piksel mora imati da bi ušao u normaliziranu derivaciju, kao na slici 13. Pikseli nižeg intenziteta se zanemaruju jer se inače procesom normalizacije šum povećava. Ispitane su vrijednosti praga derivacije od 10, 20, 30 i 40. Najbolji rezultati postižu se za prag derivacije 30. Pri stvaranju derivacija slika se lokalno normalizira po formuli (5). Normalizacija se odvija tako da se svi pikseli prozora pomnože s nekim faktorom, tako da piksel najvećeg intenziteta dobije intenzitet 255. Prozor normalizacije zadaje veličinu prozora. Manjom veličinom prozora postiže se lokalizirana normalizacija i uvodi veća razina šuma. Slika 26 uspoređuje rezultate normalizacije za različite veličine prozora normalizacije. Odabrana 26
30 veličina prozora je 25x25, koja ima jednake rezultate kao i veličina 15x15. Normalizacija smanjuje grešku sa 5% na 2% uz grešku na klasifikaciji nepješaka od 1%. 105 Detektirani pješaci [%] Detektirani nepješaci [%] Bez normalizacije Normalizacija 25 Normalizacija 15 Normalizacija 10 Normalizacija 5 Slika 26. ROC krivulja za različite vrste normalizacije Prozor obrisa dijeli sliku na podprozore iz kojih se stvaraju obrisi. Primjer prozora obrisa prikazan je slikom 14. Ovaj parametar određuje veličinu prozora za svaki obris. Među testiranim veličinama od 5,10 i 15, najbolja se pokazala veličina 5. Manja veličina prozora prisiljava klasifikator da uključi više obrisa, a time i više pokazivača iz različitih dijelova slike. Slika 27 prikazuje rezultate klasifikatora s različitim veličinama prozora obrisa. Detektirani pješaci [%] Detektirani nepješaci [%] Obris 5 Obris 10 Obris 15 Slika 27. ROC krivulje za različite veličine obrisa 27
31 Slika 28 prikazuje detekciju u ovisnosti o broju pokazivača uključenih u obris. Intuitivno, više uključenih pokazivača znači i više informacija o slici, pa će detekcija za više pokazivača biti bolja. Ipak, pokazuje se da je 10 uključenih pokazivača bolje od 20. Područje koje pokriva obris pri tome je konstantnih 5x Detektirani pješaci [%] Pokazivaci 20 Pokazivaci 10 Pokazivaci Detektirani nepješaci [%] Slika 28. ROC krivulje za različiti broj pokazivača po obrisu Pri usrednjavanju svaki piksel postaje srednja vrijednost svojih susjeda. Veličinu susjedstva definira ovaj parametar. Od ispitanih vrijednosti, najboljom se pokazala 3, pa su susjedi svakog piksela 8 okolnih piksela. Može se dogoditi da neki obris potpuno točno razdvaja sve trenirane slike pješaka i nepješaka. Tada je njegova pogreška 0, što u skladu s formulom (9) daje beskonačnu snagu obrisu. Zbog toga se minimalna greška u tom slučaju postavlja na vrijednost AdaBoost epsilona. Vrijednost 1-20 odabrana je među razmatranim 1-10, 1-15, 1-20,
32 4 Detekcija pješaka u slikama Nakon što je objašnjeno podešavanje klasifikatora, u narednom dijelu objašnjava se korištenje treniranog klasifikatora za pronalaženje pješaka na slikama, kao u primjeru slike 23. Treba imati na umu da klasifikator za podsliku veličine 128x64 odgovara na pitanje: da li je na isječku pješak? Dio slike za koji se pitanje postavlja nazivamo prozorom. Pješak će biti detektiran samo ako je u sredini i dominantan u prozoru. Pri traženju pješaka na slici, lokacija prozora pomiče se po slici i za svaki prozor postavlja upit pred klasifikator. Korak kojim se pomiče prozor je 5 piksela. Primjerom, za neku poziciju (x,y) klasifikator odgovara na pitanje je li u pravokutnoj podslici (x,y)-(x+128,y+64) pješak. Nakon toga se prozor pomiče za 5 piksela desno i upit ponavlja za podsliku (x+5,y+5)-(x+5+128,y+5+64). Broj prozora koje treba ispitati jednak je H*W/S 2, gdje su H i W dimenzije slike, a S veličina koraka. Za sliku veličine 320x64 i S=5 treba ispitati 3072 prozora. Za sliku veličine 640x480 broj prozora penje se na Pomicanjem prozora po slici nisu riješeni svi izazovi detekcije. Već je rečeno da pješak mora zauzimati dominantan dio slike, kao u slikama nad kojima je klasifikator treniran. Postavlja se pitanje, što ako je pješak manjih ili većih dimenzija od treniranih 128x64? Klasifikator nije moguće prilagoditi, budući da je on treniran na velikom broju slika, već treba prilagoditi veličinu pješaka. Zato se nakon prolaza prozora kroz sliku ona treba skalirati za faktor 1.2 i postupak ponoviti. Ako je slika bila dimenzija 640x480, skaliranjem za faktor 1.2 nova će slika biti veličine 533x Ubrzanje klasificiranja prozora Da bi se klasifikacija provela, potrebno je izraditi slike derivacija. Složenost ove operacije je O(H*W*S 2 *D), gdje su H i W dimenzije prozora, ovdje 128 i 64. S 2 je prozor kojim se izvodi usrednjavanje, u primjeni S=3. D je broj smjerova po kojima se izvode derivacije, D=4. Slike derivacije ne rade se za svaki podprozor, već za cijelu sliku na početku pretrage. Skaliranjem se i derivacije skaliraju za isti koeficijent. 29
33 Samo klasificiranje prozora teče tako da sliku ocjenjuju obrisi i računa se suma njihovih težinskih glasova. Ukupan broj obrisa je oko 330, a svaki sadrži 10 pokazivača, kako je objašnjeno u dijelu o parametrima. Ubrzanjem klasificiranja nastojao se ukupan broj ispitanih pokazivača po prozoru smanjiti. Ubrzanje se vrši kroz kaskadno ocjenjivanje. Cilj je kaskade podijeliti ocjenu prozora u više dijelova, te nakon svakog dijela eliminirati postotak najlošijih kandidata za pješaka. Kaskada je usmjerena na eliminiranje nepješaka, budući da će u detekciji pješaka na slici puno veći postotak prozora činiti nepješaci. Obrisi se svrstavaju po snazi, tj. po težini svojih glasova, te se najprije vrši ispitivanje 25 najboljih obrisa. Ako je ocjena 25 najboljih obrisa manja od granice, prozor se odbacuje kao nepješak. Ako je ocjena veća od sustav nastavlja klasifikaciju u drugi dio kaskade. Ispituje se daljnjih 25 obrisa s novom granicom i ponovno odbacuju najlošiji kandidati. Kaskada ukupno ima 4 dijela i 100 obrisa. Slika 29 prikazuje postotak odbačenih prozora za svaki stupanj kaskade. Testni primjer je 200 slika pješaka i 800 slika nepješaka. Prvi test u kaskadi odbacuje 64% nepješaka uz 0.25% pješaka. Idealan test odbacivao bi što više nepješaka i nijednog pješaka. Slika 29. Prikaz kaskade klasifikatora Već je rečeno da postoji ukupno oko 330 obrisa, svaki sa 10 pokazivača, što čini 3330 pokazivača ukupno. Kaskadno testiranje pokazuje da se za prozor nepješaka testira prosječno 40 obrisa s po 10 pokazivača, što je ubrzanje od oko 8 puta. 30

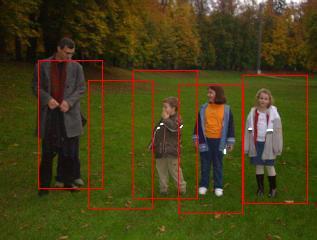
34 4.2 Detekcija pješaka klasifikacijom prozora Pomicanjem prozora po slici, kao što je opisano u uvodu 4. poglavlja, isti pješak detektira se više puta. Pri tome se i neki prozori koji pripadaju pozadini detektiraju kao pješak, ali za takve detekcije najčešće vrijedi da ne dolaze grupirane, već su više nasumično raspoređene. Slika 30 prikazuje višestruke detekcije karakteristične za osobu i izdvojenu pogrešnu detekciju. Slika 30. Višestruke detekcije osobe na slici Da bi se višestruke bliske detekcije spojile u jednu detekciju osobe, a izvojene detekcije odbacile koristi se sljedeći algoritam: Napravi pomoćnu sliku tako da svakoj poziciji prozora pripada jedna točka Idi po svim lokacijama prozora, korakom od 5 piksela: - Ako je u određenom prozoru detektiran pješak, označi tu točku crnom bojom u pomoćnoj slici, u suprotnom je točka bijela. Nakon što su pregledani svi prozori: - Proširi sve crne komponente za jedan piksel - Za svaku komponentu površine veće od 20, izračunaj njeno središte - Središte svake komponente veće od 20 označi kao pješaka 31
,(0,5), (0,235),(1,0),,(315,235).")
 Pomoćna slika koja se koristi u algoritmu prikazana je na slici 31, zajedno sa slikom u kojoj su prikazane višestruke detekcije.")
35 Detalji pomoćne slike pokazuju se primjerom. Ako je slika u kojoj se detektiraju pješaci velika 320x240, tada postoji 320x240/25 prozora koji će se klasificirati kao pješak ili nepješak. Redom, lokacije tih podprozora su: (0,0),(0,5), (0,235),(1,0),,(315,235). Svakom od tih lokacija pridjeljuje se točka u pomoćnoj slici, tako da lokaciji (0,0) pripada točka (0,0), prozoru na (0,5) točka (0,1) i tako redom. Formula preslikavanja je:,, (12) Pomoćna slika koja se koristi u algoritmu prikazana je na slici 31, zajedno sa slikom u kojoj su prikazane višestruke detekcije. Može se primijetiti da se osim pješaka na slici lijevo pojavljuju i dvije skupine lažnih detekcija: jedna pri sredini slike iznad lijevog pješaka i druga nešto iznad i s desne strane drugog pješaka. Lažne detekcije u pomoćnoj slici desno predstavljene su svojim komponentama. Slika 31. Višestruke detekcije opisane u pomoćnoj slici Komponente koje u se pomoćnoj slici stvaraju za lažne detekcije manje su površine od komponenti za detekcije pješaka. Prag za eliminaciju je određen kao površina od 20 piksela. Konačan rezultat nakon eliminacije vidljiv je na slici 32. Crvenom točkom na pomoćnoj slici je označena sredina svake preostale komponente, nakon eliminacije. 32

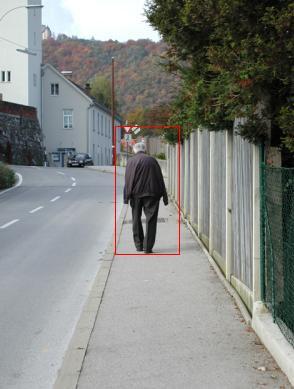
36 Slika 32. Konačna detekcija pješaka Detekcije na odabranim slikama baze INRIA priložene su u dodatku. Završne primjedbe za daljnji razvoj sustava detekcije su: - Sustav ima veći broj krivo pozitivnih detekcija u slučajevima kada je pozadina raznolika. Moguće je da bi uključivanjem većeg broja takvih slika u treniranje taj broj smanjio. - Postotak detekcije povećao bi se poboljšanjem parametara. Aplikacija je pisana tako da su svi parametri izdvojeni u posebnu klasu i jednostavno se mijenjaju. Idući korak mogao bi biti izrada testnog programa koji bi te parametre mijenjao, pokretao program za klasifikaciju i automatski računao postotak točnih detekcija. - Detekciju bi poboljšao algoritam koji će konačnu odluku o osobama na slici donositi na temelju detektiranih prozora u različitim veličinama slike, tj. algoritam koji bi spajao rezultate prije i poslije skaliranja slike. Za ostvarivanje takvog algoritma predlaže se sljedeći pristup: za svaku veličinu slike napraviti ranije opisan postupak temeljen na pomoćnoj slici. Nakon toga udruživanje provesti tako da se prednost daje detekcijama koje su veće površinom, tako da sve detekcije na slici manje veličine koje padaju unutar veće detekcije budu zanemarene. 33
37 5 Zaključak Prepoznavanje osoba u slikama važan je problem s mnogim primjenama, među kojima se ističe prepoznavanje pješaka kao osobito izazovno i traženo područje. Do sada su postignuti rezultati detekcije od 90% prepoznatih pješaka u stvarnom vremenu. Ovaj rad na tragu je takvih rezultata. Opisana su tri dijela razvoja sustava za detekciju pješaka: najvažniji među njima je izbor i priprema značajki. O izboru značajki uvelike ovise brzina i rezultati prepoznavanja. Značajke obrađene u ovom radu opisuju oblik siluete osobe, općenite su i stoga primjenjive na drugim područjima, kao što je prepoznavanje lica. Priprema značajki vremenski je najzahtjevniji dio učenja, pa se posebna pozornost posvećuje ubrzanju njihove obrade. Drugi dio sustava za detekciju pješaka je implementacija algoritma strojnog učenja. AdaBoost se pokazao kao učinkovit, jednostavan i memorijski skroman kandidat. Budući da je moguće da se ovaj algoritam usmjeri na mali broj značajki koje dobro opisuju trenirani skup slika, ali ne i testni skup, značajke se izrađuju u dvije razine. Značajke niže razine opisuju pojedine piksele slike, a značajke više razine organiziraju bliske niže značajke u cjeline. Kako se u klasifikator trenira nad svim značajkama više razine, algoritam učenja prisiljava se na upotrebu nižih značajki sa svih dijelova slike. Posljednji dio izrade sustava za detekciju je izrada kaskade i uporaba klasifikatora za detekciju. Ovaj dio zahtjeva opsežna testiranja za podešavanje parametara, pa do izražaja dolazi sam dizajn aplikacije i jednostavnost uporabe. U sklopu ovog dijela implementiran je algoritam koji rezultate postignute u detekciji prozora prenosi na detekciju pješaka u slikama. Iako su sva tri navedena koraka potrebna za stvaranje sustava implementirana, težište rada je stavljano na odabir značajki i strojno učenje. Postignuti rezultati mogu se usporediti s poznatim radovima ovog područja: postotak detekcije prozora penje se do 98% za pješake i nepješake. Mijenjanjem parametara rezultati se poboljšavaju unutar istog reda veličine. 34
38 Kako je odabir vrste značajki ključan za uspjeh prepoznavanja, predlaže se novi pristup dizajnu značajki: osmisliti algoritam koji će samostalno odabrati najbolje vrste značajki i te značajke međusobno kombinirati. Takav algoritam trebao bi kombinirati najbolja svojstva Haarovih značajki i značajki temeljenih na obliku, ili možda tek otkriti novu vrstu uspješnih značajki. Izazov stvaranja takvog algoritma bio bi dvostruk: kao prvo, potrebno je na općenit način opisati značajku, tako da u taj opis spadaju postojeće uspješne značajke. Kao drugo, potrebno je prostor mogućnosti na inteligentan način pretražiti, budući da će on svakako biti prevelik za jednostavnu pretragu. 35






39 6 Dodatak Slike uspješnih i neuspješnih detekcija. 36
SAS On Demand. Video: Upute za registraciju:
 SAS On Demand Video: http://www.sas.com/apps/webnet/video-sharing.html?bcid=3794695462001 Upute za registraciju: 1. Registracija na stranici: https://odamid.oda.sas.com/sasodaregistration/index.html U
SAS On Demand Video: http://www.sas.com/apps/webnet/video-sharing.html?bcid=3794695462001 Upute za registraciju: 1. Registracija na stranici: https://odamid.oda.sas.com/sasodaregistration/index.html U
Biznis scenario: sekcije pk * id_sekcije * naziv. projekti pk * id_projekta * naziv ꓳ profesor fk * id_sekcije
 Biznis scenario: U školi postoje četiri sekcije sportska, dramska, likovna i novinarska. Svaka sekcija ima nekoliko aktuelnih projekata. Likovna ima četiri projekta. Za projekte Pikaso, Rubens i Rembrant
Biznis scenario: U školi postoje četiri sekcije sportska, dramska, likovna i novinarska. Svaka sekcija ima nekoliko aktuelnih projekata. Likovna ima četiri projekta. Za projekte Pikaso, Rubens i Rembrant
Eduroam O Eduroam servisu edu roam Uputstvo za podešavanje Eduroam konekcije NAPOMENA: Microsoft Windows XP Change advanced settings
 Eduroam O Eduroam servisu Eduroam - educational roaming je besplatan servis za pristup Internetu. Svojim korisnicima omogućava bezbedan, brz i jednostavan pristup Internetu širom sveta, bez potrebe za
Eduroam O Eduroam servisu Eduroam - educational roaming je besplatan servis za pristup Internetu. Svojim korisnicima omogućava bezbedan, brz i jednostavan pristup Internetu širom sveta, bez potrebe za
GUI Layout Manager-i. Bojan Tomić Branislav Vidojević
 GUI Layout Manager-i Bojan Tomić Branislav Vidojević Layout Manager-i ContentPane Centralni deo prozora Na njega se dodaju ostale komponente (dugmići, polja za unos...) To je objekat klase javax.swing.jpanel
GUI Layout Manager-i Bojan Tomić Branislav Vidojević Layout Manager-i ContentPane Centralni deo prozora Na njega se dodaju ostale komponente (dugmići, polja za unos...) To je objekat klase javax.swing.jpanel
SIMPLE PAST TENSE (prosto prošlo vreme) Građenje prostog prošlog vremena zavisi od toga da li je glagol koji ga gradi pravilan ili nepravilan.
 Građenje prostog prošlog vremena zavisi od toga da li je glagol koji ga gradi pravilan ili nepravilan.") SIMPLE PAST TENSE (prosto prošlo vreme) Građenje prostog prošlog vremena zavisi od toga da li je glagol koji ga gradi pravilan ili nepravilan. 1) Kod pravilnih glagola, prosto prošlo vreme se gradi tako
SIMPLE PAST TENSE (prosto prošlo vreme) Građenje prostog prošlog vremena zavisi od toga da li je glagol koji ga gradi pravilan ili nepravilan. 1) Kod pravilnih glagola, prosto prošlo vreme se gradi tako
Port Community System
 Port Community System Konferencija o jedinstvenom pomorskom sučelju i digitalizaciji u pomorskom prometu 17. Siječanj 2018. godine, Zagreb Darko Plećaš Voditelj Odsjeka IS-a 1 Sadržaj Razvoj lokalnog PCS
Port Community System Konferencija o jedinstvenom pomorskom sučelju i digitalizaciji u pomorskom prometu 17. Siječanj 2018. godine, Zagreb Darko Plećaš Voditelj Odsjeka IS-a 1 Sadržaj Razvoj lokalnog PCS
CJENIK APLIKACIJE CERAMIC PRO PROIZVODA STAKLO PLASTIKA AUTO LAK KOŽA I TEKSTIL ALU FELGE SVJETLA
 KOŽA I TEKSTIL ALU FELGE CJENIK APLIKACIJE CERAMIC PRO PROIZVODA Radovi prije aplikacije: Prije nanošenja Ceramic Pro premaza površina vozila na koju se nanosi mora bi dovedena u korektno stanje. Proces
KOŽA I TEKSTIL ALU FELGE CJENIK APLIKACIJE CERAMIC PRO PROIZVODA Radovi prije aplikacije: Prije nanošenja Ceramic Pro premaza površina vozila na koju se nanosi mora bi dovedena u korektno stanje. Proces
Podešavanje za eduroam ios
 Copyright by AMRES Ovo uputstvo se odnosi na Apple mobilne uređaje: ipad, iphone, ipod Touch. Konfiguracija podrazumeva podešavanja koja se vrše na računaru i podešavanja na mobilnom uređaju. Podešavanja
Copyright by AMRES Ovo uputstvo se odnosi na Apple mobilne uređaje: ipad, iphone, ipod Touch. Konfiguracija podrazumeva podešavanja koja se vrše na računaru i podešavanja na mobilnom uređaju. Podešavanja
Ulazne promenljive se nazivaju argumenti ili fiktivni parametri. Potprogram se poziva u okviru programa, kada se pri pozivu navode stvarni parametri.
 Potprogrami su delovi programa. Često se delovi koda ponavljaju u okviru nekog programa. Logično je da se ta grupa komandi izdvoji u potprogram, i da se po želji poziva u okviru programa tamo gde je potrebno.
Potprogrami su delovi programa. Često se delovi koda ponavljaju u okviru nekog programa. Logično je da se ta grupa komandi izdvoji u potprogram, i da se po želji poziva u okviru programa tamo gde je potrebno.
IZDAVANJE SERTIFIKATA NA WINDOWS 10 PLATFORMI
 IZDAVANJE SERTIFIKATA NA WINDOWS 10 PLATFORMI Za pomoć oko izdavanja sertifikata na Windows 10 operativnom sistemu možete se obratiti na e-mejl adresu esupport@eurobank.rs ili pozivom na telefonski broj
IZDAVANJE SERTIFIKATA NA WINDOWS 10 PLATFORMI Za pomoć oko izdavanja sertifikata na Windows 10 operativnom sistemu možete se obratiti na e-mejl adresu esupport@eurobank.rs ili pozivom na telefonski broj
BENCHMARKING HOSTELA
 BENCHMARKING HOSTELA IZVJEŠTAJ ZA SVIBANJ. BENCHMARKING HOSTELA 1. DEFINIRANJE UZORKA Tablica 1. Struktura uzorka 1 BROJ HOSTELA BROJ KREVETA Ukupno 1016 643 1971 Regije Istra 2 227 Kvarner 4 5 245 991
BENCHMARKING HOSTELA IZVJEŠTAJ ZA SVIBANJ. BENCHMARKING HOSTELA 1. DEFINIRANJE UZORKA Tablica 1. Struktura uzorka 1 BROJ HOSTELA BROJ KREVETA Ukupno 1016 643 1971 Regije Istra 2 227 Kvarner 4 5 245 991
STABLA ODLUČIVANJA. Jelena Jovanovic. Web:
 STABLA ODLUČIVANJA Jelena Jovanovic Email: jeljov@gmail.com Web: http://jelenajovanovic.net 2 Zahvalnica: Ovi slajdovi su bazirani na materijalima pripremljenim za kurs Applied Modern Statistical Learning
STABLA ODLUČIVANJA Jelena Jovanovic Email: jeljov@gmail.com Web: http://jelenajovanovic.net 2 Zahvalnica: Ovi slajdovi su bazirani na materijalima pripremljenim za kurs Applied Modern Statistical Learning
Klasterizacija. NIKOLA MILIKIĆ URL:
 Klasterizacija NIKOLA MILIKIĆ EMAIL: nikola.milikic@fon.bg.ac.rs URL: http://nikola.milikic.info Klasterizacija Klasterizacija (eng. Clustering) spada u grupu tehnika nenadgledanog učenja i omogućava grupisanje
Klasterizacija NIKOLA MILIKIĆ EMAIL: nikola.milikic@fon.bg.ac.rs URL: http://nikola.milikic.info Klasterizacija Klasterizacija (eng. Clustering) spada u grupu tehnika nenadgledanog učenja i omogućava grupisanje
PROJEKTNI PRORAČUN 1
 PROJEKTNI PRORAČUN 1 Programski period 2014. 2020. Kategorije troškova Pojednostavlj ene opcije troškova (flat rate, lump sum) Radni paketi Pripremni troškovi, troškovi zatvaranja projekta Stope financiranja
PROJEKTNI PRORAČUN 1 Programski period 2014. 2020. Kategorije troškova Pojednostavlj ene opcije troškova (flat rate, lump sum) Radni paketi Pripremni troškovi, troškovi zatvaranja projekta Stope financiranja
Uvod u relacione baze podataka
 Uvod u relacione baze podataka 25. novembar 2011. godine 7. čas SQL skalarne funkcije, operatori ANY (SOME) i ALL 1. Za svakog studenta izdvojiti ime i prezime i broj različitih ispita koje je pao (ako
Uvod u relacione baze podataka 25. novembar 2011. godine 7. čas SQL skalarne funkcije, operatori ANY (SOME) i ALL 1. Za svakog studenta izdvojiti ime i prezime i broj različitih ispita koje je pao (ako
KAPACITET USB GB. Laserska gravura. po jednoj strani. Digitalna štampa, pun kolor, po jednoj strani USB GB 8 GB 16 GB.
 9.72 8.24 6.75 6.55 6.13 po 9.30 7.89 5.86 10.48 8.89 7.30 7.06 6.61 11.51 9.75 8.00 7.75 7.25 po 0.38 10.21 8.66 7.11 6.89 6.44 11.40 9.66 9.73 7.69 7.19 12.43 1 8.38 7.83 po 0.55 0.48 0.37 11.76 9.98
9.72 8.24 6.75 6.55 6.13 po 9.30 7.89 5.86 10.48 8.89 7.30 7.06 6.61 11.51 9.75 8.00 7.75 7.25 po 0.38 10.21 8.66 7.11 6.89 6.44 11.40 9.66 9.73 7.69 7.19 12.43 1 8.38 7.83 po 0.55 0.48 0.37 11.76 9.98
Struktura indeksa: B-stablo. ls/swd/btree/btree.html
 Struktura indeksa: B-stablo http://cis.stvincent.edu/html/tutoria ls/swd/btree/btree.html Uvod ISAM (Index-Sequential Access Method, IBM sredina 60-tih godina 20. veka) Nedostaci: sekvencijalno pretraživanje
Struktura indeksa: B-stablo http://cis.stvincent.edu/html/tutoria ls/swd/btree/btree.html Uvod ISAM (Index-Sequential Access Method, IBM sredina 60-tih godina 20. veka) Nedostaci: sekvencijalno pretraživanje
Tutorijal za Štefice za upload slika na forum.
 Tutorijal za Štefice za upload slika na forum. Postoje dvije jednostavne metode za upload slika na forum. Prva metoda: Otvoriti nova tema ili odgovori ili citiraj već prema želji. U donjem dijelu obrasca
Tutorijal za Štefice za upload slika na forum. Postoje dvije jednostavne metode za upload slika na forum. Prva metoda: Otvoriti nova tema ili odgovori ili citiraj već prema želji. U donjem dijelu obrasca
AMRES eduroam update, CAT alat za kreiranje instalera za korisničke uređaje. Marko Eremija Sastanak administratora, Beograd,
 AMRES eduroam update, CAT alat za kreiranje instalera za korisničke uređaje Marko Eremija Sastanak administratora, Beograd, 12.12.2013. Sadržaj eduroam - uvod AMRES eduroam statistika Novine u okviru eduroam
AMRES eduroam update, CAT alat za kreiranje instalera za korisničke uređaje Marko Eremija Sastanak administratora, Beograd, 12.12.2013. Sadržaj eduroam - uvod AMRES eduroam statistika Novine u okviru eduroam
Kooperativna meteorološka stanica za cestovni promet
 Kooperativna meteorološka stanica za cestovni promet Marko Gojić LED ELEKTRONIKA d.o.o. marko.gojic@led-elektronika.hr LED Elektronika d.o.o. Savska 102a, 10310 Ivanić Grad, Croatia tel: +385 1 4665 269
Kooperativna meteorološka stanica za cestovni promet Marko Gojić LED ELEKTRONIKA d.o.o. marko.gojic@led-elektronika.hr LED Elektronika d.o.o. Savska 102a, 10310 Ivanić Grad, Croatia tel: +385 1 4665 269
Nejednakosti s faktorijelima
 Osječki matematički list 7007, 8 87 8 Nejedakosti s faktorijelima Ilija Ilišević Sažetak Opisae su tehike kako se mogu dokazati ejedakosti koje sadrže faktorijele Spomeute tehike su ilustrirae a izu zaimljivih
Osječki matematički list 7007, 8 87 8 Nejedakosti s faktorijelima Ilija Ilišević Sažetak Opisae su tehike kako se mogu dokazati ejedakosti koje sadrže faktorijele Spomeute tehike su ilustrirae a izu zaimljivih
Windows Easy Transfer
 čet, 2014-04-17 12:21 - Goran Šljivić U članku o skorom isteku Windows XP podrške [1] koja prestaje 8. travnja 2014. spomenuli smo PCmover Express i PCmover Professional kao rješenja za preseljenje korisničkih
čet, 2014-04-17 12:21 - Goran Šljivić U članku o skorom isteku Windows XP podrške [1] koja prestaje 8. travnja 2014. spomenuli smo PCmover Express i PCmover Professional kao rješenja za preseljenje korisničkih
Sustav za gusto označavanje prometnih znakova u video sekvencama
 MSVEUČILIŠTE U ZAGREBU FAKULTET ELEKTROTEHNIKE I RAČUNARSTVA DIPLOMSKI RAD br. 1500 Sustav za gusto označavanje prometnih znakova u video sekvencama Martin Morava Zagreb, srpanj 2010 Zahvaljujem se svojem
MSVEUČILIŠTE U ZAGREBU FAKULTET ELEKTROTEHNIKE I RAČUNARSTVA DIPLOMSKI RAD br. 1500 Sustav za gusto označavanje prometnih znakova u video sekvencama Martin Morava Zagreb, srpanj 2010 Zahvaljujem se svojem
Upute za korištenje makronaredbi gml2dwg i gml2dgn
 SVEUČILIŠTE U ZAGREBU - GEODETSKI FAKULTET UNIVERSITY OF ZAGREB - FACULTY OF GEODESY Zavod za primijenjenu geodeziju; Katedra za upravljanje prostornim informacijama Institute of Applied Geodesy; Chair
SVEUČILIŠTE U ZAGREBU - GEODETSKI FAKULTET UNIVERSITY OF ZAGREB - FACULTY OF GEODESY Zavod za primijenjenu geodeziju; Katedra za upravljanje prostornim informacijama Institute of Applied Geodesy; Chair
TRENING I RAZVOJ VEŽBE 4 JELENA ANĐELKOVIĆ LABROVIĆ
 TRENING I RAZVOJ VEŽBE 4 JELENA ANĐELKOVIĆ LABROVIĆ DIZAJN TRENINGA Model trening procesa FAZA DIZAJNA CILJEVI TRENINGA Vrste ciljeva treninga 1. Ciljevi učesnika u treningu 2. Ciljevi učenja Opisuju željene
TRENING I RAZVOJ VEŽBE 4 JELENA ANĐELKOVIĆ LABROVIĆ DIZAJN TRENINGA Model trening procesa FAZA DIZAJNA CILJEVI TRENINGA Vrste ciljeva treninga 1. Ciljevi učesnika u treningu 2. Ciljevi učenja Opisuju željene
Priprema podataka. NIKOLA MILIKIĆ URL:
 Priprema podataka NIKOLA MILIKIĆ EMAIL: nikola.milikic@fon.bg.ac.rs URL: http://nikola.milikic.info Normalizacija Normalizacija je svođenje vrednosti na neki opseg (obično 0-1) FishersIrisDataset.arff
Priprema podataka NIKOLA MILIKIĆ EMAIL: nikola.milikic@fon.bg.ac.rs URL: http://nikola.milikic.info Normalizacija Normalizacija je svođenje vrednosti na neki opseg (obično 0-1) FishersIrisDataset.arff
1. Instalacija programske podrške
 U ovom dokumentu opisana je instalacija PBZ USB PKI uređaja na računala korisnika PBZCOM@NET internetskog bankarstva. Uputa je podijeljena na sljedeće cjeline: 1. Instalacija programske podrške 2. Promjena
U ovom dokumentu opisana je instalacija PBZ USB PKI uređaja na računala korisnika PBZCOM@NET internetskog bankarstva. Uputa je podijeljena na sljedeće cjeline: 1. Instalacija programske podrške 2. Promjena
Idejno rješenje: Dubrovnik Vizualni identitet kandidature Dubrovnika za Europsku prijestolnicu kulture 2020.
 Idejno rješenje: Dubrovnik 2020. Vizualni identitet kandidature Dubrovnika za Europsku prijestolnicu kulture 2020. vizualni identitet kandidature dubrovnika za europsku prijestolnicu kulture 2020. visual
Idejno rješenje: Dubrovnik 2020. Vizualni identitet kandidature Dubrovnika za Europsku prijestolnicu kulture 2020. vizualni identitet kandidature dubrovnika za europsku prijestolnicu kulture 2020. visual
Bušilice nove generacije. ImpactDrill
 NOVITET Bušilice nove generacije ImpactDrill Nove udarne bušilice od Bosch-a EasyImpact 550 EasyImpact 570 UniversalImpact 700 UniversalImpact 800 AdvancedImpact 900 Dostupna od 01.05.2017 2 Logika iza
NOVITET Bušilice nove generacije ImpactDrill Nove udarne bušilice od Bosch-a EasyImpact 550 EasyImpact 570 UniversalImpact 700 UniversalImpact 800 AdvancedImpact 900 Dostupna od 01.05.2017 2 Logika iza
3D GRAFIKA I ANIMACIJA
 1 3D GRAFIKA I ANIMACIJA Uvod u Flash CS3 Šta će se raditi? 2 Upoznavanje interfejsa Osnovne osobine Definisanje osnovnih entiteta Rad sa bojama Rad sa linijama Definisanje i podešavanje ispuna Pregled
1 3D GRAFIKA I ANIMACIJA Uvod u Flash CS3 Šta će se raditi? 2 Upoznavanje interfejsa Osnovne osobine Definisanje osnovnih entiteta Rad sa bojama Rad sa linijama Definisanje i podešavanje ispuna Pregled
CJENOVNIK KABLOVSKA TV DIGITALNA TV INTERNET USLUGE
 CJENOVNIK KABLOVSKA TV Za zasnivanje pretplatničkog odnosa za korištenje usluga kablovske televizije potrebno je da je tehnički izvodljivo (mogude) priključenje na mrežu Kablovskih televizija HS i HKBnet
CJENOVNIK KABLOVSKA TV Za zasnivanje pretplatničkog odnosa za korištenje usluga kablovske televizije potrebno je da je tehnički izvodljivo (mogude) priključenje na mrežu Kablovskih televizija HS i HKBnet
Vrednovanje postupka semantičke segmentacije temeljenog na slučajnim šumama
 SVEUČILIŠTE U ZAGREBU FAKULTET ELEKTROTEHNIKE I RAČUNARSTVA ZAVRŠNI RAD br. 3943 Vrednovanje postupka semantičke segmentacije temeljenog na slučajnim šumama Ivan Fabijanić Zagreb, lipanj 2015. Velika
SVEUČILIŠTE U ZAGREBU FAKULTET ELEKTROTEHNIKE I RAČUNARSTVA ZAVRŠNI RAD br. 3943 Vrednovanje postupka semantičke segmentacije temeljenog na slučajnim šumama Ivan Fabijanić Zagreb, lipanj 2015. Velika
Advertising on the Web
 Advertising on the Web On-line algoritmi Off-line algoritam: ulazni podaci su dostupni na početku, algoritam može pristupati podacima u bilo kom redosljedu, na kraju se saopštava rezultat obrade On-line
Advertising on the Web On-line algoritmi Off-line algoritam: ulazni podaci su dostupni na početku, algoritam može pristupati podacima u bilo kom redosljedu, na kraju se saopštava rezultat obrade On-line
JEDINSTVENI PORTAL POREZNE UPRAVE. Priručnik za instalaciju Google Chrome dodatka. (Opera preglednik)
") JEDINSTVENI PORTAL POREZNE UPRAVE Priručnik za instalaciju Google Chrome dodatka (Opera preglednik) V1 OPERA PREGLEDNIK Opera preglednik s verzijom 32 na dalje ima tehnološke promjene zbog kojih nije moguće
JEDINSTVENI PORTAL POREZNE UPRAVE Priručnik za instalaciju Google Chrome dodatka (Opera preglednik) V1 OPERA PREGLEDNIK Opera preglednik s verzijom 32 na dalje ima tehnološke promjene zbog kojih nije moguće
ENR 1.4 OPIS I KLASIFIKACIJA VAZDUŠNOG PROSTORA U KOME SE PRUŽAJU ATS USLUGE ENR 1.4 ATS AIRSPACE CLASSIFICATION AND DESCRIPTION
 VFR AIP Srbija / Crna Gora ENR 1.4 1 ENR 1.4 OPIS I KLASIFIKACIJA VAZDUŠNOG PROSTORA U KOME SE PRUŽAJU ATS USLUGE ENR 1.4 ATS AIRSPACE CLASSIFICATION AND DESCRIPTION 1. KLASIFIKACIJA VAZDUŠNOG PROSTORA
VFR AIP Srbija / Crna Gora ENR 1.4 1 ENR 1.4 OPIS I KLASIFIKACIJA VAZDUŠNOG PROSTORA U KOME SE PRUŽAJU ATS USLUGE ENR 1.4 ATS AIRSPACE CLASSIFICATION AND DESCRIPTION 1. KLASIFIKACIJA VAZDUŠNOG PROSTORA
Mindomo online aplikacija za izradu umnih mapa
 Mindomo online aplikacija za izradu umnih mapa Mindomo je online aplikacija za izradu umnih mapa (vrsta dijagrama specifične forme koji prikazuje ideje ili razmišljanja na svojevrstan način) koja omogućuje
Mindomo online aplikacija za izradu umnih mapa Mindomo je online aplikacija za izradu umnih mapa (vrsta dijagrama specifične forme koji prikazuje ideje ili razmišljanja na svojevrstan način) koja omogućuje
Da bi se napravio izvještaj u Accessu potrebno je na izborniku Create odabrati karticu naredbi Reports.
 IZVJEŠTAJI U MICROSOFT ACCESS-u (eng. reports) su dijelovi baze podataka koji omogućavaju definiranje i opisivanje načina ispisa podataka iz baze podataka na papir (ili PDF dokument). Način izrade identičan
IZVJEŠTAJI U MICROSOFT ACCESS-u (eng. reports) su dijelovi baze podataka koji omogućavaju definiranje i opisivanje načina ispisa podataka iz baze podataka na papir (ili PDF dokument). Način izrade identičan
ECONOMIC EVALUATION OF TOBACCO VARIETIES OF TOBACCO TYPE PRILEP EKONOMSKO OCJENIVANJE SORTE DUHANA TIPA PRILEP
 ECONOMIC EVALUATION OF TOBACCO VARIETIES OF TOBACCO TYPE PRILEP EKONOMSKO OCJENIVANJE SORTE DUHANA TIPA PRILEP M. Mitreski, A. Korubin-Aleksoska, J. Trajkoski, R. Mavroski ABSTRACT In general every agricultural
ECONOMIC EVALUATION OF TOBACCO VARIETIES OF TOBACCO TYPE PRILEP EKONOMSKO OCJENIVANJE SORTE DUHANA TIPA PRILEP M. Mitreski, A. Korubin-Aleksoska, J. Trajkoski, R. Mavroski ABSTRACT In general every agricultural
Trening: Obzor financijsko izvještavanje i osnovne ugovorne obveze
 Trening: Obzor 2020. - financijsko izvještavanje i osnovne ugovorne obveze Ana Ključarić, Obzor 2020. nacionalna osoba za kontakt za financijska pitanja PROGRAM DOGAĐANJA (9:30-15:00) 9:30 10:00 Registracija
Trening: Obzor 2020. - financijsko izvještavanje i osnovne ugovorne obveze Ana Ključarić, Obzor 2020. nacionalna osoba za kontakt za financijska pitanja PROGRAM DOGAĐANJA (9:30-15:00) 9:30 10:00 Registracija
ANALIZA PRIMJENE KOGENERACIJE SA ORGANSKIM RANKINOVIM CIKLUSOM NA BIOMASU U BOLNICAMA
 ANALIZA PRIMJENE KOGENERACIJE SA ORGANSKIM RANKINOVIM CIKLUSOM NA BIOMASU U BOLNICAMA Nihad HARBAŠ Samra PRAŠOVIĆ Azrudin HUSIKA Sadržaj ENERGIJSKI BILANSI DIMENZIONISANJE POSTROJENJA (ORC + VRŠNI KOTLOVI)
ANALIZA PRIMJENE KOGENERACIJE SA ORGANSKIM RANKINOVIM CIKLUSOM NA BIOMASU U BOLNICAMA Nihad HARBAŠ Samra PRAŠOVIĆ Azrudin HUSIKA Sadržaj ENERGIJSKI BILANSI DIMENZIONISANJE POSTROJENJA (ORC + VRŠNI KOTLOVI)
KONFIGURACIJA MODEMA. ZyXEL Prestige 660RU
 KONFIGURACIJA MODEMA ZyXEL Prestige 660RU Sadržaj Funkcionalnost lampica... 3 Priključci na stražnjoj strani modema... 4 Proces konfiguracije... 5 Vraćanje modema na tvorničke postavke... 5 Konfiguracija
KONFIGURACIJA MODEMA ZyXEL Prestige 660RU Sadržaj Funkcionalnost lampica... 3 Priključci na stražnjoj strani modema... 4 Proces konfiguracije... 5 Vraćanje modema na tvorničke postavke... 5 Konfiguracija
MINISTRY OF THE SEA, TRANSPORT AND INFRASTRUCTURE
 MINISTRY OF THE SEA, TRANSPORT AND INFRASTRUCTURE 3309 Pursuant to Article 1021 paragraph 3 subparagraph 5 of the Maritime Code ("Official Gazette" No. 181/04 and 76/07) the Minister of the Sea, Transport
MINISTRY OF THE SEA, TRANSPORT AND INFRASTRUCTURE 3309 Pursuant to Article 1021 paragraph 3 subparagraph 5 of the Maritime Code ("Official Gazette" No. 181/04 and 76/07) the Minister of the Sea, Transport
Upotreba selektora. June 04
 Upotreba selektora programa KRONOS 1 Kronos sistem - razina 1 Podešavanje vremena LAMPEGGIANTI 1. Kada je pećnica uključena prvi put, ili u slučaju kvara ili prekida u napajanju, simbol SATA i odgovarajuća
Upotreba selektora programa KRONOS 1 Kronos sistem - razina 1 Podešavanje vremena LAMPEGGIANTI 1. Kada je pećnica uključena prvi put, ili u slučaju kvara ili prekida u napajanju, simbol SATA i odgovarajuća
Programiranje. Nastava: prof.dr.sc. Dražena Gašpar. Datum:
 Programiranje Nastava: prof.dr.sc. Dražena Gašpar Datum: 21.03.2017. 1 Pripremiti za sljedeće predavanje Sljedeće predavanje: 21.03.2017. Napraviti program koji koristi sve tipove podataka, osnovne operatore
Programiranje Nastava: prof.dr.sc. Dražena Gašpar Datum: 21.03.2017. 1 Pripremiti za sljedeće predavanje Sljedeće predavanje: 21.03.2017. Napraviti program koji koristi sve tipove podataka, osnovne operatore
TRAJANJE AKCIJE ILI PRETHODNOG ISTEKA ZALIHA ZELENI ALAT
 TRAJANJE AKCIJE 16.01.2019-28.02.2019 ILI PRETHODNOG ISTEKA ZALIHA ZELENI ALAT Akcija sa poklonima Digitally signed by pki, pki, BOSCH, EMEA, BOSCH, EMEA, R, A, radivoje.stevanovic R, A, 2019.01.15 11:41:02
TRAJANJE AKCIJE 16.01.2019-28.02.2019 ILI PRETHODNOG ISTEKA ZALIHA ZELENI ALAT Akcija sa poklonima Digitally signed by pki, pki, BOSCH, EMEA, BOSCH, EMEA, R, A, radivoje.stevanovic R, A, 2019.01.15 11:41:02
Tema 2: Uvod u sisteme za podršku odlučivanju (VEŽBE)
") Tema 2: Uvod u sisteme za podršku odlučivanju (VEŽBE) SISTEMI ZA PODRŠKU ODLUČIVANJU dr Vladislav Miškovic vmiskovic@singidunum.ac.rs Fakultet za računarstvo i informatiku 2013/2014 Tema 2: Uvod u sisteme
Tema 2: Uvod u sisteme za podršku odlučivanju (VEŽBE) SISTEMI ZA PODRŠKU ODLUČIVANJU dr Vladislav Miškovic vmiskovic@singidunum.ac.rs Fakultet za računarstvo i informatiku 2013/2014 Tema 2: Uvod u sisteme
KOMPARATIVNA ANALIZA PREDIKTIVNIH TEHNIKA RUDARENJA PODATAKA
 SVEUČILIŠTE U SPLITU EKONOMSKI FAKULTET DIPLOMSKI RAD KOMPARATIVNA ANALIZA PREDIKTIVNIH TEHNIKA RUDARENJA PODATAKA MENTOR: STUDENT: izv.prof.dr.sc. Mario Jadrić Frane Ivanišević Split, rujan 2016 2 SAŽETAK
SVEUČILIŠTE U SPLITU EKONOMSKI FAKULTET DIPLOMSKI RAD KOMPARATIVNA ANALIZA PREDIKTIVNIH TEHNIKA RUDARENJA PODATAKA MENTOR: STUDENT: izv.prof.dr.sc. Mario Jadrić Frane Ivanišević Split, rujan 2016 2 SAŽETAK
STRUKTURNO KABLIRANJE
 STRUKTURNO KABLIRANJE Sistematski pristup kabliranju Kreiranje hijerarhijski organizirane kabelske infrastrukture Za strukturno kabliranje potrebno je ispuniti: Generalnost ožičenja Zasidenost radnog područja
STRUKTURNO KABLIRANJE Sistematski pristup kabliranju Kreiranje hijerarhijski organizirane kabelske infrastrukture Za strukturno kabliranje potrebno je ispuniti: Generalnost ožičenja Zasidenost radnog područja
Otpremanje video snimka na YouTube
 Otpremanje video snimka na YouTube Korak br. 1 priprema snimka za otpremanje Da biste mogli da otpremite video snimak na YouTube, potrebno je da imate kreiran nalog na gmailu i da video snimak bude u nekom
Otpremanje video snimka na YouTube Korak br. 1 priprema snimka za otpremanje Da biste mogli da otpremite video snimak na YouTube, potrebno je da imate kreiran nalog na gmailu i da video snimak bude u nekom
AUTOMATSKO RASPOZNAVANJE OSMJEHA IZ SLIKE LICA
 SVEUČILIŠTE U ZAGREBU FAKULTET ELEKTROTEHNIKE I RAČUNARSTVA ZAVRŠNI RAD br. 3873 AUTOMATSKO RASPOZNAVANJE OSMJEHA IZ SLIKE LICA Dario Jaić Zagreb, svibanj 2015. Sadržaj Popis kratica... ii Popis slika...
SVEUČILIŠTE U ZAGREBU FAKULTET ELEKTROTEHNIKE I RAČUNARSTVA ZAVRŠNI RAD br. 3873 AUTOMATSKO RASPOZNAVANJE OSMJEHA IZ SLIKE LICA Dario Jaić Zagreb, svibanj 2015. Sadržaj Popis kratica... ii Popis slika...
Naredba je uputa računalu za obavljanje određene operacije.
 OSNOVNI POJMOVI Naredba je uputa računalu za obavljanje određene operacije. Program je niz naredbi razumljivih računalu koje rješavaju neki problem. Postupak pisanja programa zovemo programiranje. Programski
OSNOVNI POJMOVI Naredba je uputa računalu za obavljanje određene operacije. Program je niz naredbi razumljivih računalu koje rješavaju neki problem. Postupak pisanja programa zovemo programiranje. Programski
Iskustva video konferencija u školskim projektima
 Medicinska škola Ante Kuzmanića Zadar www.medskolazd.hr Iskustva video konferencija u školskim projektima Edin Kadić, profesor mentor Ante-Kuzmanic@medskolazd.hr Kreiranje ideje 2003. Administracija Učionice
Medicinska škola Ante Kuzmanića Zadar www.medskolazd.hr Iskustva video konferencija u školskim projektima Edin Kadić, profesor mentor Ante-Kuzmanic@medskolazd.hr Kreiranje ideje 2003. Administracija Učionice
int[] brojilo; // polje cjelih brojeva double[] vrijednosti; // polje realnih brojeva
![int[] brojilo; // polje cjelih brojeva double[] vrijednosti; // polje realnih brojeva](/thumbs/72/67829808.jpg "int[] brojilo; // polje cjelih brojeva double[] vrijednosti; // polje realnih brojeva") Polja Polje (eng. array) Polje je imenovani uređeni skup indeksiranih vrijednosti istog tipa (niz, lista, matrica, tablica) Kod deklaracije, iza naziva tipa dolaze uglate zagrade: int[] brojilo; // polje
Polja Polje (eng. array) Polje je imenovani uređeni skup indeksiranih vrijednosti istog tipa (niz, lista, matrica, tablica) Kod deklaracije, iza naziva tipa dolaze uglate zagrade: int[] brojilo; // polje
Mogudnosti za prilagođavanje
 Mogudnosti za prilagođavanje Shaun Martin World Wildlife Fund, Inc. 2012 All rights reserved. Mogudnosti za prilagođavanje Za koje ste primere aktivnosti prilagođavanja čuli, pročitali, ili iskusili? Mogudnosti
Mogudnosti za prilagođavanje Shaun Martin World Wildlife Fund, Inc. 2012 All rights reserved. Mogudnosti za prilagođavanje Za koje ste primere aktivnosti prilagođavanja čuli, pročitali, ili iskusili? Mogudnosti
Svojstva olovke x (0,0)
") Kornjačina grafika O modulu turtle Sadrži funkcije za crtanje Izvođenjem naredbi otvara se grafički prozor veličine 600x600 piksela Olovka (pokazivač) je postavljena u središtu prozora i usmjerena udesno
Kornjačina grafika O modulu turtle Sadrži funkcije za crtanje Izvođenjem naredbi otvara se grafički prozor veličine 600x600 piksela Olovka (pokazivač) je postavljena u središtu prozora i usmjerena udesno
Primjena termovizijskih sustava za nadzor granice, štićenih objekata i prostora
 Primjena termovizijskih sustava za nadzor granice, štićenih objekata i prostora Mate Krišto RH MUP matekrishto@gmail.com Sažetak - Osnovni cilj ovog rada je prikaz postojećih metoda u području primjene
Primjena termovizijskih sustava za nadzor granice, štićenih objekata i prostora Mate Krišto RH MUP matekrishto@gmail.com Sažetak - Osnovni cilj ovog rada je prikaz postojećih metoda u području primjene
Upravljanje kvalitetom usluga. doc.dr.sc. Ines Dužević
 Upravljanje kvalitetom usluga doc.dr.sc. Ines Dužević Specifičnosti usluga Odnos prema korisnicima U prosjeku, lojalan korisnik vrijedi deset puta više nego što je vrijedio u trenutku prve kupnje. Koncept
Upravljanje kvalitetom usluga doc.dr.sc. Ines Dužević Specifičnosti usluga Odnos prema korisnicima U prosjeku, lojalan korisnik vrijedi deset puta više nego što je vrijedio u trenutku prve kupnje. Koncept
STRUČNA PRAKSA B-PRO TEMA 13
 MAŠINSKI FAKULTET U BEOGRADU Katedra za proizvodno mašinstvo STRUČNA PRAKSA B-PRO TEMA 13 MONTAŽA I SISTEM KVALITETA MONTAŽA Kratak opis montže i ispitivanja gotovog proizvoda. Dati izgled i sadržaj tehnološkog
MAŠINSKI FAKULTET U BEOGRADU Katedra za proizvodno mašinstvo STRUČNA PRAKSA B-PRO TEMA 13 MONTAŽA I SISTEM KVALITETA MONTAŽA Kratak opis montže i ispitivanja gotovog proizvoda. Dati izgled i sadržaj tehnološkog
DEFINISANJE TURISTIČKE TRAŽNJE
 DEFINISANJE TURISTIČKE TRAŽNJE Tražnja se može definisati kao spremnost kupaca da pri različitom nivou cena kupuju različite količine jedne robe na određenom tržištu i u određenom vremenu (Veselinović
DEFINISANJE TURISTIČKE TRAŽNJE Tražnja se može definisati kao spremnost kupaca da pri različitom nivou cena kupuju različite količine jedne robe na određenom tržištu i u određenom vremenu (Veselinović
Programiranje za internet zimski semestar 2013/2014. Java kroz primjere (skripta je u fazi izradi)
") Programiranje za internet zimski semestar 2013/2014 Java kroz primjere (skripta je u fazi izradi) Zadatak broj 1 Nacrtati kocku. (Zanimljiv teži problem za razmišljanje: Nacrtat kocku čije će dimenzije
Programiranje za internet zimski semestar 2013/2014 Java kroz primjere (skripta je u fazi izradi) Zadatak broj 1 Nacrtati kocku. (Zanimljiv teži problem za razmišljanje: Nacrtat kocku čije će dimenzije
Realizacija detektora lica na osnovu Viola-Jones algoritma
 INFOTEH-JAHORINA Vol. 11, March 2012. Realizacija detektora lica na osnovu Viola-Jones algoritma Boško Mihić, Jelena Lozanov studenti drugog ciklusa studija Fakultet tehničkih nauka Novi Sad, Srbija bmihic@gmail.com,
INFOTEH-JAHORINA Vol. 11, March 2012. Realizacija detektora lica na osnovu Viola-Jones algoritma Boško Mihić, Jelena Lozanov studenti drugog ciklusa studija Fakultet tehničkih nauka Novi Sad, Srbija bmihic@gmail.com,
Slobodni softver za digitalne arhive: EPrints u Knjižnici Filozofskog fakulteta u Zagrebu
 Slobodni softver za digitalne arhive: EPrints u Knjižnici Filozofskog fakulteta u Zagrebu Marijana Glavica Dobrica Pavlinušić http://bit.ly/ffzg-eprints Definicija
Slobodni softver za digitalne arhive: EPrints u Knjižnici Filozofskog fakulteta u Zagrebu Marijana Glavica Dobrica Pavlinušić http://bit.ly/ffzg-eprints Definicija
POSTUPCI ODREĐIVANJA KOSTURA MODELA NA OSNOVI POLIGONALNOG MODELA
 SVEUĈILIŠTE U ZAGREBU FAKULTET ELEKTROTEHNIKE I RAČUNARSTVA ZAVRŠNI RAD br. 1915 POSTUPCI ODREĐIVANJA KOSTURA MODELA NA OSNOVI POLIGONALNOG MODELA Robert Mrkonjić Zagreb, lipanj 2011. SADRŽAJ: 1. UVOD...
SVEUĈILIŠTE U ZAGREBU FAKULTET ELEKTROTEHNIKE I RAČUNARSTVA ZAVRŠNI RAD br. 1915 POSTUPCI ODREĐIVANJA KOSTURA MODELA NA OSNOVI POLIGONALNOG MODELA Robert Mrkonjić Zagreb, lipanj 2011. SADRŽAJ: 1. UVOD...
ANALIZA PRIKUPLJENIH PODATAKA O KVALITETU ZRAKA NA PODRUČJU OPĆINE LUKAVAC ( ZA PERIOD OD DO GOD.)
") Bosna i Hercegovina Federacija Bosne i Hercegovine Tuzlanski kanton Ministarstvo prostornog uređenja i zaštite okolice ANALIZA PRIKUPLJENIH PODATAKA O KVALITETU ZRAKA NA PODRUČJU OPĆINE LUKAVAC ( ZA PERIOD
Bosna i Hercegovina Federacija Bosne i Hercegovine Tuzlanski kanton Ministarstvo prostornog uređenja i zaštite okolice ANALIZA PRIKUPLJENIH PODATAKA O KVALITETU ZRAKA NA PODRUČJU OPĆINE LUKAVAC ( ZA PERIOD
GLEDANOST TELEVIZIJSKIH PROGRAMA PROSINAC Konzumacija TV-a u prosincu godine
 GLEDANOST TELEVIZIJSKIH PROGRAMA PROSINAC 2016. Agencija za elektroničke medije u suradnji s AGB Nielsenom, specijaliziranom agencijom za istraživanje gledanosti televizije, mjesečno će donositi analize
GLEDANOST TELEVIZIJSKIH PROGRAMA PROSINAC 2016. Agencija za elektroničke medije u suradnji s AGB Nielsenom, specijaliziranom agencijom za istraživanje gledanosti televizije, mjesečno će donositi analize
Fakultet strojarstva i brodogradnje ZAVRŠNI RAD
 Sveučilište u Zagrebu Fakultet strojarstva i brodogradnje ZAVRŠNI RAD Zagreb, 2010. Darko Dokladal Sveučilište u Zagrebu Fakultet strojarstva i brodogradnje ZAVRŠNI RAD Voditelj rada: Prof. dr. sc. Mario
Sveučilište u Zagrebu Fakultet strojarstva i brodogradnje ZAVRŠNI RAD Zagreb, 2010. Darko Dokladal Sveučilište u Zagrebu Fakultet strojarstva i brodogradnje ZAVRŠNI RAD Voditelj rada: Prof. dr. sc. Mario
DETEKCIJA OBJEKTA UZ POMOĆ WEB KAMERE I OPENCV-A
 SVEUČILIŠTE JOSIPA JURJA STROSSMAYERA U OSIJEKU FAKULTET ELEKTROTEHNIKE RAČUNARSTVA I INFORMACIJSKIH TEHNOLOGIJA OSIJEK Preddiplomski sveučilišni studij računarstva DETEKCIJA OBJEKTA UZ POMOĆ WEB KAMERE
SVEUČILIŠTE JOSIPA JURJA STROSSMAYERA U OSIJEKU FAKULTET ELEKTROTEHNIKE RAČUNARSTVA I INFORMACIJSKIH TEHNOLOGIJA OSIJEK Preddiplomski sveučilišni studij računarstva DETEKCIJA OBJEKTA UZ POMOĆ WEB KAMERE
Uticaj parametara PID regulatora i vremenskog kašnjenja na odziv i amplitudno-faznu karakteristiku sistema Simulink
 LV6 Uticaj parametara PID regulatora i vremenskog kašnjenja na odziv i amplitudno-faznu karakteristiku sistema Simulink U automatizaciji objekta često koristimo upravljanje sa negativnom povratnom vezom
LV6 Uticaj parametara PID regulatora i vremenskog kašnjenja na odziv i amplitudno-faznu karakteristiku sistema Simulink U automatizaciji objekta često koristimo upravljanje sa negativnom povratnom vezom
WELLNESS & SPA YOUR SERENITY IS OUR PRIORITY. VAŠ MIR JE NAŠ PRIORITET!
 WELLNESS & SPA YOUR SERENITY IS OUR PRIORITY. VAŠ MIR JE NAŠ PRIORITET! WELLNESS & SPA DNEVNA KARTA DAILY TICKET 35 BAM / 3h / person RADNO VRIJEME OPENING HOURS 08:00-21:00 Besplatno za djecu do 6 godina
WELLNESS & SPA YOUR SERENITY IS OUR PRIORITY. VAŠ MIR JE NAŠ PRIORITET! WELLNESS & SPA DNEVNA KARTA DAILY TICKET 35 BAM / 3h / person RADNO VRIJEME OPENING HOURS 08:00-21:00 Besplatno za djecu do 6 godina
PROGRAMSKI SUSTAV ZA RASPOZNAVANJE TISKANOG TEKSTA
 SVEUČILIŠTE U ZAGREBU FAKULTET ELEKTROTEHNIKE I RAČUNARSTVA ZAVRŠNI RAD br. 858 PROGRAMSKI SUSTAV ZA RASPOZNAVANJE TISKANOG TEKSTA Mladen Jurković Zagreb, lipanj 2009. Mladen Jurković, 0036428019 Sadržaj
SVEUČILIŠTE U ZAGREBU FAKULTET ELEKTROTEHNIKE I RAČUNARSTVA ZAVRŠNI RAD br. 858 PROGRAMSKI SUSTAV ZA RASPOZNAVANJE TISKANOG TEKSTA Mladen Jurković Zagreb, lipanj 2009. Mladen Jurković, 0036428019 Sadržaj
Pronalaženje mikrotubula u trodimenzionalnim mikroskopskim slikama
 SVEUČILIŠTE U ZAGREBU FAKULTET ELEKTROTEHNIKE I RAČUNARSTVA ZAVRŠNI RAD br. 5122 Pronalaženje mikrotubula u trodimenzionalnim mikroskopskim slikama Pero Skoko Zagreb, srpanj 2017. i iii SADRŽAJ 1. Uvod
SVEUČILIŠTE U ZAGREBU FAKULTET ELEKTROTEHNIKE I RAČUNARSTVA ZAVRŠNI RAD br. 5122 Pronalaženje mikrotubula u trodimenzionalnim mikroskopskim slikama Pero Skoko Zagreb, srpanj 2017. i iii SADRŽAJ 1. Uvod
CRNA GORA
 HOTEL PARK 4* POLOŽAJ: uz more u Boki kotorskoj, 12 km od Herceg-Novog. SADRŽAJI: 252 sobe, recepcija, bar, restoran, besplatno parkiralište, unutarnji i vanjski bazen s terasom za sunčanje, fitnes i SPA
HOTEL PARK 4* POLOŽAJ: uz more u Boki kotorskoj, 12 km od Herceg-Novog. SADRŽAJI: 252 sobe, recepcija, bar, restoran, besplatno parkiralište, unutarnji i vanjski bazen s terasom za sunčanje, fitnes i SPA
- je mreža koja služi za posluživanje prometa između centrala
 Spojna mreža - je mreža koja služi za posluživanje prometa između centrala Zvjezdasti T - sve centrale na nekom području spajaju se na jednu od njih, koja onda dalje posreduje njihov promet - u manjim
Spojna mreža - je mreža koja služi za posluživanje prometa između centrala Zvjezdasti T - sve centrale na nekom području spajaju se na jednu od njih, koja onda dalje posreduje njihov promet - u manjim
- Vežba 1 (dodatan materijal) - Kreiranje Web šablona (template) pomoću softvera Adobe Photoshop CS
 - Kreiranje Web šablona (template) pomoću softvera Adobe Photoshop CS") - Vežba 1 (dodatan materijal) - Kreiranje Web šablona (template) pomoću softvera Adobe Photoshop CS 1. Pokrenite Adobe Photoshop CS i otvorite novi dokument sa komandom File / New 2. Otvoriće se dijalog
- Vežba 1 (dodatan materijal) - Kreiranje Web šablona (template) pomoću softvera Adobe Photoshop CS 1. Pokrenite Adobe Photoshop CS i otvorite novi dokument sa komandom File / New 2. Otvoriće se dijalog
Automatske Maske za zavarivanje. Stella, black carbon. chain and skull. clown. blue carbon
 Automatske Maske za zavarivanje Stella Podešavanje DIN: 9-13 Brzina senzora: 1/30.000s Vidno polje : 98x55mm Četiri optička senzora Napajanje : Solarne ćelije + dve litijumske neizmenjive baterije. Vek
Automatske Maske za zavarivanje Stella Podešavanje DIN: 9-13 Brzina senzora: 1/30.000s Vidno polje : 98x55mm Četiri optička senzora Napajanje : Solarne ćelije + dve litijumske neizmenjive baterije. Vek
DEVELOPMENT POSSIBILITIES FOR THE LOCATION IN ŽUDETIĆI LIST 1
 Spuštajući se od Vižinade prema Porto Portonu i rijeci Mirni, prije sela Žudetica - zapadno od glavne ceste a između sela Vrbana i Pastorčića, okružena šumom i poljoprivrednim zemljištem, nalazi se predmetna
Spuštajući se od Vižinade prema Porto Portonu i rijeci Mirni, prije sela Žudetica - zapadno od glavne ceste a između sela Vrbana i Pastorčića, okružena šumom i poljoprivrednim zemljištem, nalazi se predmetna
RANI BOOKING TURSKA LJETO 2017
 PUTNIČKA AGENCIJA FIBULA AIR TRAVEL AGENCY D.O.O. UL. FERHADIJA 24; 71000 SARAJEVO; BIH TEL:033/232523; 033/570700; E-MAIL: INFO@FIBULA.BA; FIBULA@BIH.NET.BA; WEB: WWW.FIBULA.BA SUDSKI REGISTAR: UF/I-1769/02,
PUTNIČKA AGENCIJA FIBULA AIR TRAVEL AGENCY D.O.O. UL. FERHADIJA 24; 71000 SARAJEVO; BIH TEL:033/232523; 033/570700; E-MAIL: INFO@FIBULA.BA; FIBULA@BIH.NET.BA; WEB: WWW.FIBULA.BA SUDSKI REGISTAR: UF/I-1769/02,
1.7 Predstavljanje negativnih brojeva u binarnom sistemu
 .7 Predstavljanje negativnih brojeva u binarnom sistemu U decimalnom brojnom sistemu pozitivni brojevi se predstavljaju znakom + napisanim ispred cifara koje definišu apsolutnu vrednost broja, odnosno
.7 Predstavljanje negativnih brojeva u binarnom sistemu U decimalnom brojnom sistemu pozitivni brojevi se predstavljaju znakom + napisanim ispred cifara koje definišu apsolutnu vrednost broja, odnosno
Vizijski sustav za praćenje pozicije čovjeka pomoću algoritma oduzimanja pozadine
 Primljen: 13.9.2017. Stručni rad Prihvaćen: 11.10.2017. UDK: 681.52./53 Vizijski sustav za praćenje pozicije čovjeka pomoću algoritma oduzimanja pozadine Vision System for Human Position Tracking by Means
Primljen: 13.9.2017. Stručni rad Prihvaćen: 11.10.2017. UDK: 681.52./53 Vizijski sustav za praćenje pozicije čovjeka pomoću algoritma oduzimanja pozadine Vision System for Human Position Tracking by Means
Office 365, upute za korištenje elektroničke pošte
 Office 365, upute za korištenje elektroničke pošte Naša ustanova koristi uslugu elektroničke pošte u oblaku, u sklopu usluge Office 365. To znači da elektronička pošta više nije pohranjena na našem serveru
Office 365, upute za korištenje elektroničke pošte Naša ustanova koristi uslugu elektroničke pošte u oblaku, u sklopu usluge Office 365. To znači da elektronička pošta više nije pohranjena na našem serveru
DETEKCIJA LJUDI NA ZRAČNIM SLIKAMA UPOTREBOM KONVOLUCIJSKIH NEURONSKIH MREŽA
 S V E U ČILIŠTE U SPLITU FAKULTET ELEKTROTEHNIKE, STROJARSTVA I BRODOGRADNJE POSLIJEDIPLOMSKI DOKTORSKI STUDIJ ELEKTROTEHNIKE I INFORMACIJSKE TEHNOLOGIJE KVALIFIKACIJSKI ISPIT DETEKCIJA LJUDI NA ZRAČNIM
S V E U ČILIŠTE U SPLITU FAKULTET ELEKTROTEHNIKE, STROJARSTVA I BRODOGRADNJE POSLIJEDIPLOMSKI DOKTORSKI STUDIJ ELEKTROTEHNIKE I INFORMACIJSKE TEHNOLOGIJE KVALIFIKACIJSKI ISPIT DETEKCIJA LJUDI NA ZRAČNIM
Klasifikacija objekata na slici korištenjem superviziranog učenja
 Univerzitet u Sarajevu Elektrotehnički fakultet Odsjek za telekomunikacije Klasifikacija objekata na slici korištenjem superviziranog učenja - Drugi ciklus studija - Autor: Halać Delila Mentori: Doc.dr
Univerzitet u Sarajevu Elektrotehnički fakultet Odsjek za telekomunikacije Klasifikacija objekata na slici korištenjem superviziranog učenja - Drugi ciklus studija - Autor: Halać Delila Mentori: Doc.dr
SVEUČILIŠTE U ZAGREBU FAKULTET ELEKTROTEHNIKE I RAČUNARSTVA. DIPLOMSKI RAD br. 694 DETEKCIJA PRISUTNOSTI VOZILA UGRAĐENIM RAČUNALOM.
 SVEUČILIŠTE U ZAGREBU FAKULTET ELEKTROTEHNIKE I RAČUNARSTVA DIPLOMSKI RAD br. 694 DETEKCIJA PRISUTNOSTI VOZILA UGRAĐENIM RAČUNALOM Igor Lipovac Zagreb, lipanj, 2014. #1 SADRŽAJ" 1. Uvod... 3 2. Pregled
SVEUČILIŠTE U ZAGREBU FAKULTET ELEKTROTEHNIKE I RAČUNARSTVA DIPLOMSKI RAD br. 694 DETEKCIJA PRISUTNOSTI VOZILA UGRAĐENIM RAČUNALOM Igor Lipovac Zagreb, lipanj, 2014. #1 SADRŽAJ" 1. Uvod... 3 2. Pregled
INSTALIRANJE SOFTVERSKOG SISTEMA SURVEY
 INSTALIRANJE SOFTVERSKOG SISTEMA SURVEY Softverski sistem Survey za geodeziju, digitalnu topografiju i projektovanje u niskogradnji instalira se na sledeći način: 1. Instalirati grafičko okruženje pod
INSTALIRANJE SOFTVERSKOG SISTEMA SURVEY Softverski sistem Survey za geodeziju, digitalnu topografiju i projektovanje u niskogradnji instalira se na sledeći način: 1. Instalirati grafičko okruženje pod
DANI BRANIMIRA GUŠICA - novi prilozi poznavanju prirodoslovlja otoka Mljeta. Hotel ODISEJ, POMENA, otok Mljet, listopad 2010.
 DANI BRANIMIRA GUŠICA - novi prilozi poznavanju prirodoslovlja otoka Mljeta Hotel ODISEJ, POMENA, otok Mljet, 03. - 07. listopad 2010. ZBORNIK SAŽETAKA Geološki lokalitet i poucne staze u Nacionalnom parku
DANI BRANIMIRA GUŠICA - novi prilozi poznavanju prirodoslovlja otoka Mljeta Hotel ODISEJ, POMENA, otok Mljet, 03. - 07. listopad 2010. ZBORNIK SAŽETAKA Geološki lokalitet i poucne staze u Nacionalnom parku
WWF. Jahorina
 WWF For an introduction Jahorina 23.2.2009 What WWF is World Wide Fund for Nature (formerly World Wildlife Fund) In the US still World Wildlife Fund The World s leading independent conservation organisation
WWF For an introduction Jahorina 23.2.2009 What WWF is World Wide Fund for Nature (formerly World Wildlife Fund) In the US still World Wildlife Fund The World s leading independent conservation organisation
MASKE U MICROSOFT ACCESS-u
 MASKE U MICROSOFT ACCESS-u Maske (Forms) ili obrasci su objekti baze podataka u Accessu koji služe za unošenje, brisanje i mijenjanje podataka u tablicama ili upitima koji imaju ljepše korisničko sučelje
MASKE U MICROSOFT ACCESS-u Maske (Forms) ili obrasci su objekti baze podataka u Accessu koji služe za unošenje, brisanje i mijenjanje podataka u tablicama ili upitima koji imaju ljepše korisničko sučelje
TEHNIĈKO VELEUĈILIŠTE U ZAGREBU ELEKTROTEHNIĈKI ODJEL Prof.dr.sc.KREŠIMIR MEŠTROVIĆ POUZDANOST VISOKONAPONSKIH PREKIDAĈA
 TEHNIĈKO VELEUĈILIŠTE U ZAGREBU ELEKTROTEHNIĈKI ODJEL Prof.dr.sc.KREŠIMIR MEŠTROVIĆ POUZDANOST VISOKONAPONSKIH PREKIDAĈA SF6 PREKIDAĈ 420 kv PREKIDNA KOMORA POTPORNI IZOLATORI POGONSKI MEHANIZAM UPRAVLJAĈKI
TEHNIĈKO VELEUĈILIŠTE U ZAGREBU ELEKTROTEHNIĈKI ODJEL Prof.dr.sc.KREŠIMIR MEŠTROVIĆ POUZDANOST VISOKONAPONSKIH PREKIDAĈA SF6 PREKIDAĈ 420 kv PREKIDNA KOMORA POTPORNI IZOLATORI POGONSKI MEHANIZAM UPRAVLJAĈKI
PREDVIĐANJA U TURIZMU TEMELJENA NA METODI NAJMANJIH KVADRATA
 PREDVIĐANJA U TURIZMU TEMELJENA NA METODI NAJMANJIH KVADRATA Datum prijave: 4.3.2013. UDK 379.8:910.4:519.2 Datum prihvaćanja: 31.5.2013. Stručni rad Prof.dr.sc. Dominika Crnjac Milić, Robert Brandalik,
PREDVIĐANJA U TURIZMU TEMELJENA NA METODI NAJMANJIH KVADRATA Datum prijave: 4.3.2013. UDK 379.8:910.4:519.2 Datum prihvaćanja: 31.5.2013. Stručni rad Prof.dr.sc. Dominika Crnjac Milić, Robert Brandalik,
PRIMJENA RAZLIČITIH METODA STROJNOG UČENJA U PROBLEMU KLASIFIKACIJE SLIKARSKIH DJELA PREMA AUTORU
 SVEUČILIŠTE U ZAGREBU FAKULTET ELEKTROTEHNIKE I RAČUNARSTVA PRIMJENA RAZLIČITIH METODA STROJNOG UČENJA U PROBLEMU KLASIFIKACIJE SLIKARSKIH DJELA PREMA AUTORU Autor: Eva Cetinić, mag. ing. Predmet: Otkrivanje
SVEUČILIŠTE U ZAGREBU FAKULTET ELEKTROTEHNIKE I RAČUNARSTVA PRIMJENA RAZLIČITIH METODA STROJNOG UČENJA U PROBLEMU KLASIFIKACIJE SLIKARSKIH DJELA PREMA AUTORU Autor: Eva Cetinić, mag. ing. Predmet: Otkrivanje
Detekcija prometnih znakova na temelju boje i oblika
 SVEUČILIŠTE U ZAGREBU FAKULTET ELEKTROTEHNIKE I RAČUNARSTVA ZAVRŠNI RAD br. 1048 Detekcija prometnih znakova na temelju boje i oblika Marijana Milas Zagreb, siječanj 2010. Zahvala : Zahvaljujem mentoru
SVEUČILIŠTE U ZAGREBU FAKULTET ELEKTROTEHNIKE I RAČUNARSTVA ZAVRŠNI RAD br. 1048 Detekcija prometnih znakova na temelju boje i oblika Marijana Milas Zagreb, siječanj 2010. Zahvala : Zahvaljujem mentoru
Modelling Transport Demands in Maritime Passenger Traffic Modeliranje potražnje prijevoza u putničkom pomorskom prometu
 Modelling Transport Demands in Maritime Passenger Traffic Modeliranje potražnje prijevoza u putničkom pomorskom prometu Drago Pupavac Polytehnic of Rijeka Rijeka e-mail: drago.pupavac@veleri.hr Veljko
Modelling Transport Demands in Maritime Passenger Traffic Modeliranje potražnje prijevoza u putničkom pomorskom prometu Drago Pupavac Polytehnic of Rijeka Rijeka e-mail: drago.pupavac@veleri.hr Veljko
11 Analiza i dizajn informacionih sistema
 11 Analiza i dizajn informacionih sistema Informatika V.Prof.dr Kemal Hajdarević dipl.ing.el 25.4.2014 11:58:28 1 1. Kompjuter, Internet, i mrežne osnove 2. Kompjuterska industrija Informatika u stomatologiji
11 Analiza i dizajn informacionih sistema Informatika V.Prof.dr Kemal Hajdarević dipl.ing.el 25.4.2014 11:58:28 1 1. Kompjuter, Internet, i mrežne osnove 2. Kompjuterska industrija Informatika u stomatologiji
4. Stabla odlučivanja
 4. Stabla odlučivanja MARIJANA ZEKIĆ-SUŠAC SVEUČILIŠTE J.J. STROSSMAYERA U OSIJEKU, EKONOMSKI FAKULTET U OSIJEKU 1 Što ćete naučiti u ovom poglavlju? Što su i koje su vrste stabala odlučivanja? Kako funkcioniraju
4. Stabla odlučivanja MARIJANA ZEKIĆ-SUŠAC SVEUČILIŠTE J.J. STROSSMAYERA U OSIJEKU, EKONOMSKI FAKULTET U OSIJEKU 1 Što ćete naučiti u ovom poglavlju? Što su i koje su vrste stabala odlučivanja? Kako funkcioniraju
UNIVERZITET U BEOGRADU RUDARSKO GEOLOŠKI FAKULTET DEPARTMAN ZA HIDROGEOLOGIJU ZBORNIK RADOVA. ZLATIBOR maj godine
 UNIVERZITETUBEOGRADU RUDARSKOGEOLOŠKIFAKULTET DEPARTMANZAHIDROGEOLOGIJU ZBORNIKRADOVA ZLATIBOR 1720.maj2012.godine XIVSRPSKISIMPOZIJUMOHIDROGEOLOGIJI ZBORNIKRADOVA IZDAVA: ZAIZDAVAA: TEHNIKIUREDNICI: TIRAŽ:
UNIVERZITETUBEOGRADU RUDARSKOGEOLOŠKIFAKULTET DEPARTMANZAHIDROGEOLOGIJU ZBORNIKRADOVA ZLATIBOR 1720.maj2012.godine XIVSRPSKISIMPOZIJUMOHIDROGEOLOGIJI ZBORNIKRADOVA IZDAVA: ZAIZDAVAA: TEHNIKIUREDNICI: TIRAŽ:
GSM TRACING SVEUČILIŠTE U ZAGREBU. FAKULTET ELEKTROTEHNIKE I RAČUNARSTVA Zavod za elektroničke sustave i obradu informacija
 SVEUČILIŠTE U ZAGREBU FAKULTET ELEKTROTEHNIKE I RAČUNARSTVA Zavod za elektroničke sustave i obradu informacija Seminarski rad iz kolegija: SUSTAVI ZA PRAĆENJE I VOĐENJE PROCESA GSM TRACING Vedran Jerbić
SVEUČILIŠTE U ZAGREBU FAKULTET ELEKTROTEHNIKE I RAČUNARSTVA Zavod za elektroničke sustave i obradu informacija Seminarski rad iz kolegija: SUSTAVI ZA PRAĆENJE I VOĐENJE PROCESA GSM TRACING Vedran Jerbić
Implementacija sparsnih matrica upotrebom listi u programskom jeziku C
 INFOTEH-JAHORINA Vol. 10, Ref. E-I-15, p. 461-465, March 2011. Implementacija sparsnih matrica upotrebom listi u programskom jeziku C Đulaga Hadžić, Ministarstvo obrazovanja, nauke, kulture i sporta Tuzlanskog
INFOTEH-JAHORINA Vol. 10, Ref. E-I-15, p. 461-465, March 2011. Implementacija sparsnih matrica upotrebom listi u programskom jeziku C Đulaga Hadžić, Ministarstvo obrazovanja, nauke, kulture i sporta Tuzlanskog
Statistička analiza algoritama za dinamičko upravljanje spremnikom
 SVEUČILIŠTE U ZAGREBU FAKULTET ELETROTEHNIKE I RAČUNARSTVA ZAVRŠNI ZADATAK br. 1716 Statistička analiza algoritama za dinamičko upravljanje spremnikom Nikola Sekulić Zagreb, lipanj 2011. Sadržaj: 1. Uvod...
SVEUČILIŠTE U ZAGREBU FAKULTET ELETROTEHNIKE I RAČUNARSTVA ZAVRŠNI ZADATAK br. 1716 Statistička analiza algoritama za dinamičko upravljanje spremnikom Nikola Sekulić Zagreb, lipanj 2011. Sadržaj: 1. Uvod...
EKSPLORATIVNA ANALIZA PODATAKA IZ SUSTAVA ZA ISPORUKU OGLASA
 SVEUČILIŠTE JOSIPA JURJA STROSSMAYERA U OSIJEKU FAKULTET ELEKTROTEHNIKE, RAČUNARSTVA I INFORMACIJSKIH TEHNOLOGIJA Sveučilišni diplomski studij računarstva EKSPLORATIVNA ANALIZA PODATAKA IZ SUSTAVA ZA ISPORUKU
SVEUČILIŠTE JOSIPA JURJA STROSSMAYERA U OSIJEKU FAKULTET ELEKTROTEHNIKE, RAČUNARSTVA I INFORMACIJSKIH TEHNOLOGIJA Sveučilišni diplomski studij računarstva EKSPLORATIVNA ANALIZA PODATAKA IZ SUSTAVA ZA ISPORUKU
NIS PETROL. Uputstvo za deaktiviranje/aktiviranje stranice Veleprodajnog cenovnika na sajtu NIS Petrol-a
 NIS PETROL Uputstvo za deaktiviranje/aktiviranje stranice Veleprodajnog cenovnika na sajtu NIS Petrol-a Beograd, 2018. Copyright Belit Sadržaj Disable... 2 Komentar na PHP kod... 4 Prava pristupa... 6
NIS PETROL Uputstvo za deaktiviranje/aktiviranje stranice Veleprodajnog cenovnika na sajtu NIS Petrol-a Beograd, 2018. Copyright Belit Sadržaj Disable... 2 Komentar na PHP kod... 4 Prava pristupa... 6