FOR INDUSTRIAL ROBOTIC APPLICATIONS
|
|
|
- Dwain Parrish
- 5 years ago
- Views:
Transcription



1 ADVANTAGES OF USING FLEXIBLE ELECTRIC GRIPPERS FOR INDUSTRIAL ROBOTIC APPLICATIONS Robotiq 2-Finger Adaptive Gripper
2 TABLE OF CONTENT INTRODUCTION... 3 SECTION 1 THE EASY GRIPPING INTELLIGENCE... 4 SECTION 2 GRIPPER COMMUNICATION BASICS... 6 SECTION 3 CREATING FASTER TIM CYCLE WITH ELECTRIC GRIPPER... 8 SECTION 4 USING THE FEEDBACK OF THE 2-FINGER ADAPTIVE GRIPPER SECTION 5 HOW TO VERIFY GRIPPER CONTACT ABOUT ROBOTIQ... 14
3 INTRODUCTION Today s manufacturers are under relentless pressure to reduce costs, increase agility and automate more processes, including the high-mix, labor intensive ones. However, existing technologies such as tool changers provide only limited and expensive solutions when it comes to handling different parts. Changeover costs, custom gripper designs and tooling costs often represent issues which can stop investment in the automation of a process. The return on investment is crucial when automating high-mix part types of applications and it is often hard to achieve. That is why 90% of US manufacturers still don t use robots in their production processes. This is why Robotiq has designed the Adaptive Robot Gripper to provide manufacturers with maximum flexibility in robotic parts handling. 2-Finger Gripper Main Features In keeping with the idea of giving manufacturers the flexibility needed to automate high-mix processes, Robotiq designed the 2-Finger Adaptive Gripper to provide unmatched versatility in handling a broad range of parts. Fully programmable, the robotic Gripper provides: Three distinct gripping modes parallel, encompassing and inside enable handling of different part geometries including flat, square, cylindrical and irregular. High payload to weight ratio coupled with long stroke enable handling of a variety of sizes in a compact form factor. Precise speed and force controls enable handling of parts of different rigidities, ranging from brittle, to deformable, to stiff. Accurate finger control enables fast cycle times through partial open/closing. Taken together, these capabilities make the 2-Finger Adaptive Gripper a perfect fit for high-mix processes such as light assembly, sorting and kitting, packaging, machine tending, bin picking and parts transfer Visit the product page of our website to get more technical information and see videos on our product s main features.

4 Section 1 THE EASY GRIPPING INTELLIGENCE When watching how the 2-Finger Adaptive Robot Gripper works you might ask yourself; how this Gripper can be so versatile while using only one actuator? The secret lies in its unique mechanical architecture. Encompassing Grip vs Pinch Grip The mechanism driving the fingers of this Gripper is optimized to obtain two distinct contact regions. The first one, called the encompassing grip region, is located at the base of the fingers, while the second one, called the pinch grip region, is located at the end/tip of the finger. The boundary between these two adjacent regions is called the equilibrium point. Pinch Grip Region Equilibrium Point Encompassing Grip Region When the contact of the finger with the object to be grasped occurs in the encompassing grip region, the finger automatically adapts to the shape of the object and curls around it. On the other hand, when the contact is made in the pinch grip region, the finger maintains its parallel motion and the object is pinched. This comportment may be observed in the following video, where the equilibrium point is indicated by an arrow sticker. The finger keeps its parallel motion when a contact is made above the equilibrium point during a pinch grip, the same is true for a contact made below the equilibrium point during an inside grip, i.e. for a force applied at the back of the finger. This unique feature allows the Gripper to pick up objects from the inside, which proves to be very useful in many situations. Coupling between the fingers In addition to the mechanism used inside each of its fingers, the Gripper also relies on a special coupling architecture between the fingers. In fact, it is mechanically designed to ensure that the two fingers move in conjunction with each other in order to center the object grasped in the middle of the Gripper. This self-centering avoids the need to use expensive sensors and is above all safer. In the same vein to make this Robot Gripper as reliable as possible, a self-locking feature has been incorporated into it between the actuator and the fingers. By doing so, we are sure that the Gripper will never release the object 4

5 and let it fall if the power is shut down. It is also economically interesting, as the actuator doesn t need to apply torque continually when an object is grasped, thus in addition to the power saved, the lifespan of the Gripper is thereby maximized. Finally, it is important to note that the Gripper may be manually opened when the power is shut down, even if the Gripper is rigidly grasping an object. 5
6 Section 2 GRIPPER COMMUNICATION BASICS As explained in the previous section, the 2-Finger Adaptive Robot Gripper is able to achieve both pinching and encompassing grips by automatically conforming to the shape of the object. The Gripper is therefore simply programmed using straightforward open/close commands (everything else is taken care of by the Gripper controller and the finger mechanism). We will now take a look at how the Gripper can be controlled: how to communicate with it, how to perform simple actions, how to adapt its behavior and how to test different commands. How to Connect to the Robot Gripper? The 2-Finger Adaptive Robot Gripper has a shared memory which can be accessed by its master (the robot). Some registers can only be read, for example to obtain the status of the Gripper, whereas other registers will also accept written commands. The read/write operations depend on the communication protocol of the Gripper which is chosen to be compatible with the robot. At the moment, the 2-Finger Adaptive Robot Gripper is compatible with six communication protocols, which makes it one of the most versatile products on the market. The current protocols are: EtherNet/IP, TCP/IP, DeviceNet, CANopen, EtherCAT and Modbus RTU. How to Send Simple Commands? The first thing to do when the Gripper is powered up is to initialize it. The initialization procedure consists of fully opening the Gripper and is required to set the "zero" position of the Gripper (or its "home" position, if you prefer). When the Gripper is initialized, it will wait for its "Go to Position Request" bit to be set before moving towards its requested position. The position request is an integer in the range: 0 to 255 and is controlled by writing the appropriate number in one of the Gripper's registers (the third one, actually). The position 0 corresponds to the fully opened position and 255 to the fully closed position (there are software limits which prevent the Gripper from reaching these theoretical limits). Once the "go to" flag is set, the Gripper can be fully closed by writing 255 in the position request register (and fully opened by writing 0). How to Change the Gripper Control Parameters? As noted above, we can establish a position request from 0 to 255 to make the Gripper fingers move towards this reference. There are also two parameters that can be adjusted similarly (with values from 0 to 255): speed and force. The Gripper motor is primarily controlled using a speed reference. Therefore, adjusting the speed parameter has a lot of influence on the Gripper's behavior. The value 0 corresponds to the minimum speed (not zero speed!) whereas the value 255 corresponds to the maximum speed of the fingers. The force parameter modifies the maximum current that is sent to the motor prior to reaching the stop position. It is worth noting that the Gripper has an auto-locking mechanism which prevents the fingers from moving when external forces are applied on them. Therefore, the maximum current sent to the motor during the grip determines the gripping force. The value 255 sets the motor current limit to its maximum value whereas the value 0 sets the Gripper to the lowest value to which the Gripper can properly move. How to Test the Commands? When the Gripper is received by the end-user, it is often useful to test its movement potential before placing it on the robot. This allows the programmer to experiment with the effect of the control parameters, to establish the best way to grip the part(s) for the targeted application or just to become comfortable with the Gripper before programming it for real. This is possible with our user interface which is distributed with the Gripper. The user 6

7 interface is compatible with Windows XP and Windows 7. The user interface allows you to modify all the control parameters and to read all the status registers. Well, this explains in a nutshell how to control the 2-Finger Adaptive Robot Gripper. If you need more information, you can take a look at the control section of the user manual or, of course, you can contact us at info@robotiq.com. 7
8 Section 3 CREATING FASTER TIME CYCLE WITH ELECTRIC GRIPPER One of the advantages of a servo-electric robot gripper is that it allows you to control the position of the fingers. If the size of the object you want to pick up is known, the fingers can be partially closed before the robot has reached the pick-up location. This, in turn, will reduce the time required to pick up the object and therefore the cycle time will be reduced. As we all know, reducing the cycle time is highly desirable as it allows us to increase the production rate of a robot. In this section, we will present how the cycle time can be reduced by programming the partial opening of the 2-Finger Robot Gripper. How to Calculate the Robot Gripper Cycle Time? If we consider a pick and place application, the cycle time can be split into two components: the time required by the robot to move during the whole cycle (Trobot) and the time required by the Gripper to pick up the object and release it (the Gripper cycle time, Tgripper). Let's focus on the Gripper cycle time as the robot component will vary too much depending on the application. The Gripper cycle time can in turn be split into three components: the time required to grip the object (Tgrip), the time required to release it (Trelease) and the idle time, which comprises all the time required for the Gripper to update its status to the master and for the master to send new commands to the Gripper, plus the time lost during the acceleration and deceleration of the fingers (Tidle). The idle time is tricky as it depends on the communication protocol and on the master and will vary slightly from one cycle to the next. Therefore, the Gripper cycle time can be split into a fixed delay (Tidle) and two delays which vary according to the grip margin (Tgrip, Trelease). The grip margin is the opening of the fingers minus the object size and is required to avoid interference between the Gripper and the object during the approach trajectory. To measure the Gripper cycle time, we ran some tests using the TCP/IP communication protocol on a standard PC. We ran the tests for both gearbox options (24:1 and 14:1) of the Gripper, using the full speed setting. We found that the cycle time varies proportionally to the grip margin, as shown on the graph below: 8
9 On the graph, it can clearly be seen that minimizing the Grip margin will have an enormous effect on the robot gripper cycle time, and as a consequence on the total cycle time. The cycle time can more than double if no attention is paid to the partial opening position! For these tests, Tidle was found to be 0.16 seconds for the 14:1 gearbox option and 0.31 seconds for the 24:1 gearbox option. Again, these values will vary depending on the master and the communication protocol of the Gripper. Tgrip and Trelease can be approximated by dividing the grip margin by the finger speed. The Gripper cycle time is therefore computed as: Tgripper = Tidle + 2 x grip margin / finger speed. How to Choose the Grip Margin? In the last section, I showed the effect of the grip margin (finger opening before the grip minus the object size) on the Gripper cycle time. Clearly, this distance has to be minimized in order to get the best production speed out of your robot. How small of a margin can we use? Well, it depends. On one hand, the Gripper repeatability is good enough to lower the margin to a very small value (under 1 mm). However, a small grip margin will require the robot to be very precise in its approach trajectory to avoid hitting the object. This may require the reduction of the robot speed, which will in turn increase the cycle time. Therefore, a trade-off has to be achieved which will depend on the application (robot, object shape variability, object positioning, etc.). Generally, it is better to use a slightly larger grip margin to avoid hitting the object in all possible situations (reliability is often more important than cycle time!). As a result, the choice of the grip margin is not always easy to optimize. To conclude, let s just say that being able to set the partial opening position is a key feature in the optimization of the cycle time. This is a clear advantage of servo-electric grippers such as the 2-finger Adaptive Robot Gripper! 9
10 Section 4 USING FEEDBACK OF 2-FINGER ADAPTIVE GRIPPER Feedback might be very useful in industrial applications. Here are few types of feedback given by our robot Gripper and how they could be used. Encoder Value The 2-Finger Adaptive Gripper has a feature which is called partial opening. This feature has two input parameters: opening limit and closing limit. In order to optimize cycle time, this feature can be set to the object's dimensions through the encoder value, which is ranged from 0 to 255. By doing so, the Gripper will respect these opening and closing limits, thus reducing cycle time by not having to fully open or close. Speed and force must still be set accordingly to your application. The encoder value can also be used as a qualitative way to measure the same object or to verify whether the Robot Gripper has picked a part in the desired way. Motor Current The motor current can be used to monitor the energy consumed in a complete cycle. This might be useful for integrators in the design of a robot cell. By knowing the motor current, power supplies and their related protection devices can be appropriately dimensioned. The motor current value, range is from 0 to 255, can be used in a qualitative way to know what final force will be applied by the fingers to the object. The 2-Finger Robot Gripper also has an auto-locking mechanism. This means that the motor doesn't need to apply force continuously on the object to maintain the designated final force. Care must be taken when using the motor current in this way. Tests must be performed with different force settings to be sure the Gripper doesn't damage any fragile parts. Object Detection and Error Messages The 2-Finger Gripper is able to detect whether an object has been picked up or not. This feedback can be very helpful when used in conjunction with a teach pendant program. In fact, recognition of object detection can be used as a conditional statement in a routine. The 2-Finger Gripper gives error messages. Based on the seriousness of these messages, the robot may be programmed in such a way that it behaves safely when Gripper errors occur. See the list of error messages in the user manual to integrate them properly into your robot program. Now that you have some ideas about how the Gripper feedback can be used with your robot, go ahead an experiment till you find the settings that work best for your application! 10
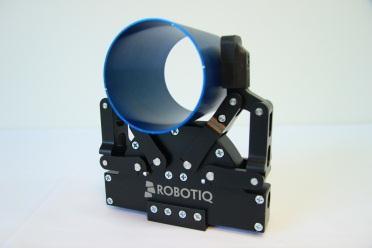
11 Section 5 HOW TO VERIFY GRIPPER CONTACT Both of our Adaptive Grippers are able to grip objects of various shapes using their innovative finger mechanism. This allows for firm grips on various objects without the need to build custom grippers for each application. In addition to this adaptability, the Gripper is able to determine when it has gripped an object. This is useful to determine if the pick-up procedure was performed correctly and if the robot can move to the next step of its program. In some cases, however, it is also useful to verify if the Gripper is still holding the object after a motion is executed by the robot. For example, if the object position was not initially determined accurately (for instance, if the object has moved or if the vision system had a problem), it is possible that the object could be picked up in an awkward position. In this situation, the object might slip out of the Gripper if the robot moves very rapidly to its next position. Knowing that the object was dropped is crucial for many applications. So below, we will explain the appropriate procedure to verify if the Adaptive Gripper still has the object after a robot motion. How the object is detected during the grip When a command is sent to close the fingers of the Gripper, the motor moves towards a target position. If the motion is stopped because the Gripper has found an object, the force applied by the fingers will increase until the current sent to the motor exceeds its limit (which is fixed using the force parameter). At that moment, the motor will stop moving and the grip force will be maintained by the Gripper's auto-locking mechanism. By reading the motor position, the Gripper is able to determine if an object was gripped or if the motion was stopped due to the fingers touching themselves. However, from that moment, the Gripper will consider that the object is gripped and will not detect an object loss unless the procedure explained in the next section is executed. How to verify if object contact is maintained Once the object is gripped, no more current is sent to the motor as the grip force is maintained by the Gripper's auto-locking mechanism. In order to verify if the Gripper still has the object, motor motion has to be re-initiated. This is simply done by first sending a "stop" command and then by sending another "go to" command with the same parameters as the initial grip. If the Gripper still has the object, no motion will be recorded (or a small one if the object is compliant) and the object will remain detected. However, if the object is no longer being grasped by the Gripper, the fingers will move and no object will be detected. So, from a technical standpoint, how is this programmed in the robot? The first thing to know is that the Gripper motion is initiated using a "go to" variable which is named rgto. When rgto = 0, the robot tells the Gripper to stop and when rgto = 1 the robot tells the Gripper to move. Also, the Gripper has an output variable ggto which is simply an echo of rgto. This variable is useful to verify if the new command was received and executed. In a more visual manner, the following diagram shows how the robot can verify if the Gripper still has the object after it has moved to the position where the Gripper will release it: 11
12 12
13 This procedure is useful in handling problems that may arise in the robot cell if, for example, the position of the object can change between the time the robot localizes the object and the time the Gripper initiates its grip. However, in many applications, the parameters are defined so precisely that this procedure might not be necessary. Anyways, as engineers we generally aspire to find the best scenario while planning for the worst. In this case, double checking everything may be a good idea! 13

14 ABOUT ROBOTIQ Robotiq designs and manufactures flexible robot grippers. We aim to give to industrial manufacturing from large businesses to SMEs flexible peripheral solutions to optimize automated processes by providing universal, agile and rugged robotic tools. We work with robot manufacturers, system integrators and end-users to enable new applications and improve productivity. We are Robotiq. We make tools for agile automation. TO LEARN MORE For any questions concerning robotic and automated handling or if you want to learn more about the advantages of using flexible electric handling tools, contact us. Phone (USA and Canada): extension 122 Phone (Anywhere in the world): extension info@robotiq.com Website: Let s keep in touch via social media ROBOTIQ S BLOG LEARN ABOUT ROBOTICS INDUSTRY NEWS, APPLICATIONS AND TRENDS GET THE LATEST NEWS ABOUT ROBOTIQ WATCH VIDEOS OF OUR PRODUCTS GET THE LATEST NEWS ABOUT ROBOTIQ 14
Custom Fingertips for Adaptive Grippers. Library and Instructions
 Custom Fingertips for Adaptive Grippers Library and Instructions TABLE OF CONTENTS INTRODUCTION... 3 1. END-EFFECTOR GRIPPING STRATEGIES... 4 2. HOW TO DESIGN GRIPPER FINGERTIPS... 7 3. HOW TO DESIGN CUSTOM
Custom Fingertips for Adaptive Grippers Library and Instructions TABLE OF CONTENTS INTRODUCTION... 3 1. END-EFFECTOR GRIPPING STRATEGIES... 4 2. HOW TO DESIGN GRIPPER FINGERTIPS... 7 3. HOW TO DESIGN CUSTOM
1224 Splitter and CTO combo, setup instructions using the Panelview HMI
 Knowledge Base Article Type: Instructions 1224 Splitter and CTO combo, setup instructions using the Panelview 1000+ HMI Description: Instructions on How to properly setup the 1224 Splitter and CTO/Clamp
Knowledge Base Article Type: Instructions 1224 Splitter and CTO combo, setup instructions using the Panelview 1000+ HMI Description: Instructions on How to properly setup the 1224 Splitter and CTO/Clamp
CASM electric cylinders
 CASM electric cylinders 2 The modular electric cylinder system CASM electric cylinders are ideally suited to performing fast and powerful linear movements. Unlike pneumatic or hydraulic cylinders, CASM
CASM electric cylinders 2 The modular electric cylinder system CASM electric cylinders are ideally suited to performing fast and powerful linear movements. Unlike pneumatic or hydraulic cylinders, CASM
American Airlines Next Top Model
 Page 1 of 12 American Airlines Next Top Model Introduction Airlines employ several distinct strategies for the boarding and deboarding of airplanes in an attempt to minimize the time each plane spends
Page 1 of 12 American Airlines Next Top Model Introduction Airlines employ several distinct strategies for the boarding and deboarding of airplanes in an attempt to minimize the time each plane spends
CASM electric cylinders The modular electric cylinder system
 CASM electric cylinders The modular electric cylinder system CASM electric cylinders are ideally suited to performing fast and powerful linear movements. Unlike pneumatic or hydraulic cylinders, CASM electric
CASM electric cylinders The modular electric cylinder system CASM electric cylinders are ideally suited to performing fast and powerful linear movements. Unlike pneumatic or hydraulic cylinders, CASM electric
Digital twin for life predictions in civil aerospace
 Digital twin for life predictions in civil aerospace Author James Domone Senior Engineer June 2018 Digital Twin for Life Predictions in Civil Aerospace Introduction Advanced technology that blurs the lines
Digital twin for life predictions in civil aerospace Author James Domone Senior Engineer June 2018 Digital Twin for Life Predictions in Civil Aerospace Introduction Advanced technology that blurs the lines
CASM electric cylinders
 CASM electric cylinders 2 The modular electric cylinder system CASM electric cylinders are ideally suited to performing fast and powerful linear movements. Unlike pneumatic or hydraulic cylinders, CASM
CASM electric cylinders 2 The modular electric cylinder system CASM electric cylinders are ideally suited to performing fast and powerful linear movements. Unlike pneumatic or hydraulic cylinders, CASM
TruPunch 1000 and TruMatic 1000 fiber. The first machine concept that grows with you. Machine tools/power tools Laser technology/electronics
 TruPunch 1000 and TruMatic 1000 fiber The first machine concept that grows with you Machine tools/power tools Laser technology/electronics 2 Starting out and scaling up TruPunch 1000 and TruMatic 1000
TruPunch 1000 and TruMatic 1000 fiber The first machine concept that grows with you Machine tools/power tools Laser technology/electronics 2 Starting out and scaling up TruPunch 1000 and TruMatic 1000
The organisation of the Airbus. A330/340 flight control system. Ian Sommerville 2001 Airbus flight control system Slide 1
 Airbus flight control system The organisation of the Airbus A330/340 flight control system Ian Sommerville 2001 Airbus flight control system Slide 1 Fly by wire control Conventional aircraft control systems
Airbus flight control system The organisation of the Airbus A330/340 flight control system Ian Sommerville 2001 Airbus flight control system Slide 1 Fly by wire control Conventional aircraft control systems
Controlled Cooking Test (CCT)
") Controlled Cooking Test (CCT) Prepared by Rob Bailis for the Household Energy and Health Programme, Shell Foundation (Not currently included in Shell HEH Stove Performance Protocols) The controlled cooking
Controlled Cooking Test (CCT) Prepared by Rob Bailis for the Household Energy and Health Programme, Shell Foundation (Not currently included in Shell HEH Stove Performance Protocols) The controlled cooking
BED BUGS SANITATION HEATING SYSTEM H4 ES
 BED BUGS SANITATION HEATING SYSTEM H4 ES RELIABLE PEST CONTROL WITHOUT CHEMICALS www.corroventa.com 1 Bed bugs and pests are a growing problem worldwide. The more we travel, the greater the risk of the
BED BUGS SANITATION HEATING SYSTEM H4 ES RELIABLE PEST CONTROL WITHOUT CHEMICALS www.corroventa.com 1 Bed bugs and pests are a growing problem worldwide. The more we travel, the greater the risk of the
Flying with L-NAV Version 5.7 and S-NAV Version 7.6 & 8.6 Dave Ellis, February 1999
 Flying with L-NAV Version 5.7 and S-NAV Version 7.6 & 8.6 Dave Ellis, February 1999 Table of Contents A. Introduction B. Cruise/Climb Switching C. The Smart Averager D. Audio Tone Patterns E. The Slow
Flying with L-NAV Version 5.7 and S-NAV Version 7.6 & 8.6 Dave Ellis, February 1999 Table of Contents A. Introduction B. Cruise/Climb Switching C. The Smart Averager D. Audio Tone Patterns E. The Slow
The next generation of in-flight, real-time 3-D moving maps. Airshow 4000 MOVING MAPS
 The next generation of in-flight, real-time 3-D moving maps. Airshow 4000 MOVING MAPS Stay engaged and aware in the air. In today s world, things happen faster than ever. You can t afford to be out of
The next generation of in-flight, real-time 3-D moving maps. Airshow 4000 MOVING MAPS Stay engaged and aware in the air. In today s world, things happen faster than ever. You can t afford to be out of
FLIGHT PATH FOR THE FUTURE OF MOBILITY
 FLIGHT PATH FOR THE FUTURE OF MOBILITY Building the flight path for the future of mobility takes more than imagination. Success relies on the proven ability to transform vision into reality for the betterment
FLIGHT PATH FOR THE FUTURE OF MOBILITY Building the flight path for the future of mobility takes more than imagination. Success relies on the proven ability to transform vision into reality for the betterment
Efficiency and Automation
 Efficiency and Automation Towards higher levels of automation in Air Traffic Management HALA! Summer School Cursos de Verano Politécnica de Madrid La Granja, July 2011 Guest Lecturer: Rosa Arnaldo Universidad
Efficiency and Automation Towards higher levels of automation in Air Traffic Management HALA! Summer School Cursos de Verano Politécnica de Madrid La Granja, July 2011 Guest Lecturer: Rosa Arnaldo Universidad
Wireless Wind Sensor Installation and Operation Instructions
 WARNINGS: RETRACTABLE AWNINGS For Technical Support visit us at www.sunsetter.com/ownerscorner or Call Toll Free 800-670-7071 Fax 877-224-4944 Wireless Wind Sensor Installation and Operation Instructions
WARNINGS: RETRACTABLE AWNINGS For Technical Support visit us at www.sunsetter.com/ownerscorner or Call Toll Free 800-670-7071 Fax 877-224-4944 Wireless Wind Sensor Installation and Operation Instructions
Cross Folder AF-76 series. AF-76 series. Cross Folder AF-764AKLL/764AKL/762KLL/762KL. Accurate Cross Folding with Easy Operation
 Cross Folder AF-76 series AF-76 series Cross Folder AF-764AKLL/764AKL/762KLL/762KL Accurate Cross Folding with Easy Operation 8-page, 16-page, and 32-page cross folding The AF-76 series folders are specially
Cross Folder AF-76 series AF-76 series Cross Folder AF-764AKLL/764AKL/762KLL/762KL Accurate Cross Folding with Easy Operation 8-page, 16-page, and 32-page cross folding The AF-76 series folders are specially
AIRBUS FlyByWire How it really works
 AIRBUS FlyByWire How it really works Comparison between APOLLO s and Phoenix PSS Airbus FlyByWire implementation for FS2002 Copyright by APOLLO Software Publishing The FlyByWire control implemented on
AIRBUS FlyByWire How it really works Comparison between APOLLO s and Phoenix PSS Airbus FlyByWire implementation for FS2002 Copyright by APOLLO Software Publishing The FlyByWire control implemented on
LED-Displays. WIBOND Series Products
 LED-Displays WIBOND Series Products Reading distances 8 8 8 38 mm 60 mm 100 mm 7 10 15 20 25 30 40 Reading distance in meter Readability is largely dependent on two factors Character-dependent influences
LED-Displays WIBOND Series Products Reading distances 8 8 8 38 mm 60 mm 100 mm 7 10 15 20 25 30 40 Reading distance in meter Readability is largely dependent on two factors Character-dependent influences
We make it fly. Digital Transformation in the Airspace industry powered by Internet of Things
 We make it fly. Digital Transformation in the Airspace industry powered by Internet of Things Dr.-Ing. Anes Hodžić Airbus Digital Transformation Office Vice President, Digital Transformation and IoT Berlin,
We make it fly. Digital Transformation in the Airspace industry powered by Internet of Things Dr.-Ing. Anes Hodžić Airbus Digital Transformation Office Vice President, Digital Transformation and IoT Berlin,
Strapping Lines in Module Structure Universal Range of Machines.
 Strapping Lines in Module Structure Universal Range of Machines. Strapping machines consumables Expert advice Customer service Cyklop System Guarantee for perfect holding POWER All from one source Perfectly
Strapping Lines in Module Structure Universal Range of Machines. Strapping machines consumables Expert advice Customer service Cyklop System Guarantee for perfect holding POWER All from one source Perfectly
Flexible Punching Machine
 Flexible Punching Machine Compact Punching, Nibbling and Forming TRUMATIC 2000 ROTATION Compact, Quick and Intelligent New Concepts in Punching Technology The TRUMATIC 2000 ROTATION rounds off the TRUMPF
Flexible Punching Machine Compact Punching, Nibbling and Forming TRUMATIC 2000 ROTATION Compact, Quick and Intelligent New Concepts in Punching Technology The TRUMATIC 2000 ROTATION rounds off the TRUMPF
GF Machining Solutions Mikron MILL E 500U-700U (5 axis)
") GF Machining Solutions Mikron MILL E 500U-700U (5 axis) GF has a Worldwide Footprint, 26 countries Over 8,500 employees, #6 machine Tool builder worldwide * Holliston, MA Nearest Technical Center 7/2018
GF Machining Solutions Mikron MILL E 500U-700U (5 axis) GF has a Worldwide Footprint, 26 countries Over 8,500 employees, #6 machine Tool builder worldwide * Holliston, MA Nearest Technical Center 7/2018
BAGGAGE HANDLING SYSTEM MAKES FAST CONNECTIONS
 BAGGAGE HANDLING SYSTEM MAKES FAST CONNECTIONS Terminal 3 offers a swift, pleasant and modern airport experience reinforcing Changi s award-winning reputation for exceptional service. A major aviation
BAGGAGE HANDLING SYSTEM MAKES FAST CONNECTIONS Terminal 3 offers a swift, pleasant and modern airport experience reinforcing Changi s award-winning reputation for exceptional service. A major aviation
Alpha Systems AOA Classic & Ultra CALIBRATION PROCEDURES
 Alpha Systems AOA Calibration Overview The calibration of the Alpha Systems AOA has 3 simple steps 1.) (On the Ground) Zero calibration 2.) (In-flight) Optimum Alpha Angle (OAA) calibration 3.) (In-flight)
Alpha Systems AOA Calibration Overview The calibration of the Alpha Systems AOA has 3 simple steps 1.) (On the Ground) Zero calibration 2.) (In-flight) Optimum Alpha Angle (OAA) calibration 3.) (In-flight)
Sow Management. Modern housing and feeding systems
 Sow Management Modern housing and feeding systems Successful sow management but how? To achieve an increase of sow perfor mance to more than 25 weaners per year is not easy but it is possible. By supplying
Sow Management Modern housing and feeding systems Successful sow management but how? To achieve an increase of sow perfor mance to more than 25 weaners per year is not easy but it is possible. By supplying
Ultramodern remote control technology for your patio comfort. Comfortable WeiTronic remote control.
 Comfortable WeiTronic remote control Ultramodern remote control technology for your patio comfort The WeiTronic operating comfort allows you to control your weinor accessories with ease through practical
Comfortable WeiTronic remote control Ultramodern remote control technology for your patio comfort The WeiTronic operating comfort allows you to control your weinor accessories with ease through practical
PSS Integrating 3 rd Party Intelligent Terminal. Application Note. Date December 15, 2009 Document number PSS5000/APNO/804680/00
 PSS 5000 Application Note Integrating 3 rd Party Intelligent Terminal Date December 15, 2009 Document number PSS5000/APNO/804680/00 Doms A/S Formervangen 28 Tel. +45 4329 9400 info@doms.dk DK-2600 Glostrup
PSS 5000 Application Note Integrating 3 rd Party Intelligent Terminal Date December 15, 2009 Document number PSS5000/APNO/804680/00 Doms A/S Formervangen 28 Tel. +45 4329 9400 info@doms.dk DK-2600 Glostrup
Weight and Balance User Guide
 Weight and Balance User Guide Selecting the Weight and Balance tab brings up the Departure and Destination screen, used for initiating the process for a standalone WB report. Select the tail to be used
Weight and Balance User Guide Selecting the Weight and Balance tab brings up the Departure and Destination screen, used for initiating the process for a standalone WB report. Select the tail to be used
Daily Estimation of Passenger Flow in Large and Complicated Urban Railway Network. Shuichi Myojo. Railway Technical Research Institute, Tokyo, Japan
 Daily Estimation of Passenger Flow in Large and Complicated Urban Railway Network Shuichi Myojo Abstract Railway Technical Research Institute, Tokyo, Japan Railway passenger flow data including the on-board
Daily Estimation of Passenger Flow in Large and Complicated Urban Railway Network Shuichi Myojo Abstract Railway Technical Research Institute, Tokyo, Japan Railway passenger flow data including the on-board
Kristina Ricks ISYS 520 VBA Project Write-up Around the World
 VBA Project Write-up Around the World Initial Problem Online resources are very valuable when searching for the cheapest flights to any particular location. Sites such as Travelocity.com, Expedia.com,
VBA Project Write-up Around the World Initial Problem Online resources are very valuable when searching for the cheapest flights to any particular location. Sites such as Travelocity.com, Expedia.com,
Dark Ride Application IO Control
 Dark Ride Application IO Control Overview Dark Rides are often the main attractions of major theme parks. They incorporate everything from highly themed scenery, props, video, audio, animatronics, lighting,
Dark Ride Application IO Control Overview Dark Rides are often the main attractions of major theme parks. They incorporate everything from highly themed scenery, props, video, audio, animatronics, lighting,
Lab Skills: Introduction to the Air Track
 Lab Skills: Introduction to the Air Track 1 What is an air track? An air track is an experimental apparatus that allows the study of motion with minimal interference by frictional forces. It consist of
Lab Skills: Introduction to the Air Track 1 What is an air track? An air track is an experimental apparatus that allows the study of motion with minimal interference by frictional forces. It consist of
PSS MVS 7.15 announcement
 PSS MVS 7.15 announcement New Mainframe Software Print SubSystem MVS 7.15 AFP printing and AFP2PDF conversion Version 7.15 Bar Code + PDF Update with additional features and fixes 2880 Bagsvaerd Tel.:
PSS MVS 7.15 announcement New Mainframe Software Print SubSystem MVS 7.15 AFP printing and AFP2PDF conversion Version 7.15 Bar Code + PDF Update with additional features and fixes 2880 Bagsvaerd Tel.:
FLIGHT OPERATIONS PANEL
 International Civil Aviation Organization FLTOPSP/WG/2-WP/14 27/04/2015 WORKING PAPER FLIGHT OPERATIONS PANEL WORKING GROUP SECOND MEETING (FLTOPSP/WG/2) Rome Italy, 4 to 8 May 2015 Agenda Item 4 : Active
International Civil Aviation Organization FLTOPSP/WG/2-WP/14 27/04/2015 WORKING PAPER FLIGHT OPERATIONS PANEL WORKING GROUP SECOND MEETING (FLTOPSP/WG/2) Rome Italy, 4 to 8 May 2015 Agenda Item 4 : Active
Flight Safety Officer Aydın Özkazanç
 Flight Safety Officer Aydın Özkazanç Loss of Control Workshop Salzburg, Austria 2012 Thank you to Dr. Dieter and his team Message and best wishes from Turkish Airlines Flight Safety Department Manager
Flight Safety Officer Aydın Özkazanç Loss of Control Workshop Salzburg, Austria 2012 Thank you to Dr. Dieter and his team Message and best wishes from Turkish Airlines Flight Safety Department Manager
A Statistical Method for Eliminating False Counts Due to Debris, Using Automated Visual Inspection for Probe Marks
 A Statistical Method for Eliminating False Counts Due to Debris, Using Automated Visual Inspection for Probe Marks SWTW 2003 Max Guest & Mike Clay August Technology, Plano, TX Probe Debris & Challenges
A Statistical Method for Eliminating False Counts Due to Debris, Using Automated Visual Inspection for Probe Marks SWTW 2003 Max Guest & Mike Clay August Technology, Plano, TX Probe Debris & Challenges
ECOSYSTEM FOR NEAR-EARTH SPACE CONTROL: METHODS AND SYSTEMS FOR PERMANENT DEBRIS REMOVAL PLUS ENHANCED NATIONAL SECURITY CAPABILITIES by
 ECOSYSTEM FOR NEAR-EARTH SPACE CONTROL: METHODS AND SYSTEMS FOR PERMANENT DEBRIS REMOVAL PLUS ENHANCED NATIONAL SECURITY CAPABILITIES by Marshall H. Kaplan, PhD Chief Technology Officer Launchspace Technologies
ECOSYSTEM FOR NEAR-EARTH SPACE CONTROL: METHODS AND SYSTEMS FOR PERMANENT DEBRIS REMOVAL PLUS ENHANCED NATIONAL SECURITY CAPABILITIES by Marshall H. Kaplan, PhD Chief Technology Officer Launchspace Technologies
Progressive Technology Facilitates Ground-To-Flight-Deck Connectivity
 Progressive Technology Facilitates Ground-To-Flight-Deck Connectivity By Robert Turner Connected Airline and Connected Flight Deck are two of the latest phrases regularly being voiced by the airline industry,
Progressive Technology Facilitates Ground-To-Flight-Deck Connectivity By Robert Turner Connected Airline and Connected Flight Deck are two of the latest phrases regularly being voiced by the airline industry,
Atennea Air. The most comprehensive ERP software for operating & financial management of your airline
 Atennea Air The most comprehensive ERP software for operating & financial management of your airline Atennea Air is an advanced and comprehensive software solution for airlines management, based on Microsoft
Atennea Air The most comprehensive ERP software for operating & financial management of your airline Atennea Air is an advanced and comprehensive software solution for airlines management, based on Microsoft
Please read this guide carefully. It tells you how to prepare your cutting plotter for production use in a few easy steps.
 OPERATING GUIDE for Secabo mini Cutting Plotter Congratulations on purchasing your Secabo mini cutting plotter! Please read this guide carefully. It tells you how to prepare your cutting plotter for production
OPERATING GUIDE for Secabo mini Cutting Plotter Congratulations on purchasing your Secabo mini cutting plotter! Please read this guide carefully. It tells you how to prepare your cutting plotter for production
EU GPP CRITERIA FOR INDOOR CLEANING SERVICES 1. INTRODUCTION
 EU GPP CRITERIA FOR INDOOR CLEANING SERVICES (please note that this document is a compilation of the criteria proposed in the 3 rd Technical Report, which should be consulted for a full understanding of
EU GPP CRITERIA FOR INDOOR CLEANING SERVICES (please note that this document is a compilation of the criteria proposed in the 3 rd Technical Report, which should be consulted for a full understanding of
Infinite possibilities for handle-less furniture. One topic. Three applications. Four motion technologies.
 Infinite possibilities for handle-less furniture One topic. Three applications. Four motion technologies. www.blum.com 2 Contents 6 8 10 12 16 20 24 30 32 36 60 62 66 One topic Handle-less furniture Three
Infinite possibilities for handle-less furniture One topic. Three applications. Four motion technologies. www.blum.com 2 Contents 6 8 10 12 16 20 24 30 32 36 60 62 66 One topic Handle-less furniture Three
A reliable deck oven that works for both confectionary and bakeries.
 DSERIES A reliable deck oven that works for both confectionary and bakeries. The D-Series consists of robust, reliable and energy-efficient ovens with double temperature sensors to ensure an even heat
DSERIES A reliable deck oven that works for both confectionary and bakeries. The D-Series consists of robust, reliable and energy-efficient ovens with double temperature sensors to ensure an even heat
PRODUCT PRESENTATION R-BUS. The great traveller
 The great traveller APPROACH The R-Bus is Niviuk s first PPG tandem wing suitable for heavy trike use but it can also be used for standard equipment and PPG tandem flights: Robust structure, up to 500
The great traveller APPROACH The R-Bus is Niviuk s first PPG tandem wing suitable for heavy trike use but it can also be used for standard equipment and PPG tandem flights: Robust structure, up to 500
Mixpac TM B-System Application System for 2-Component Products 25 ml, 50 ml and 75 ml
 Sulzer Chemtech Mixpac TM B-System Application System for 2-Component Products 25 ml, 50 ml and 75 ml 0611 4407-11 MIXPAC B-System: Process safety, Precision, Added value The Sulzer Mixpac B-System meets
Sulzer Chemtech Mixpac TM B-System Application System for 2-Component Products 25 ml, 50 ml and 75 ml 0611 4407-11 MIXPAC B-System: Process safety, Precision, Added value The Sulzer Mixpac B-System meets
Special edition paper Development of a Crew Schedule Data Transfer System
 Development of a Crew Schedule Data Transfer System Hideto Murakami* Takashi Matsumoto* Kazuya Yumikura* Akira Nomura* We developed a crew schedule data transfer system where crew schedule data is transferred
Development of a Crew Schedule Data Transfer System Hideto Murakami* Takashi Matsumoto* Kazuya Yumikura* Akira Nomura* We developed a crew schedule data transfer system where crew schedule data is transferred
Form 91 Application for Approval of an EFB System
 Form 91 Application for Approval of an EFB System This form must be completed by the Flight Representative (FOR) or Operator as recorded on the current Form 20. Please refer to RP4 Guidance to Operators
Form 91 Application for Approval of an EFB System This form must be completed by the Flight Representative (FOR) or Operator as recorded on the current Form 20. Please refer to RP4 Guidance to Operators
CertainTeed. Access Covers and Gratings. REXUS Manhole Covers
 CertainTeed Access Covers and Gratings REXUS Manhole Covers Advanced Ergonomics REXUS enables utility personnel to undertake visual inspections and routine maintenance of underground networks with the
CertainTeed Access Covers and Gratings REXUS Manhole Covers Advanced Ergonomics REXUS enables utility personnel to undertake visual inspections and routine maintenance of underground networks with the
Capacity kw. Thermal turndown from specified maximum capacity 8:1 8:1
 3-18.3-5 Specifications of OXY-THERM TITAN burners Typical burner data Fuel: natural gas at 15 C with 10.9 kwh/nm 3 HHV - sg = 0.6 Oxygen: 90-100% purity Stated pressures are indicative. Actual pressures
3-18.3-5 Specifications of OXY-THERM TITAN burners Typical burner data Fuel: natural gas at 15 C with 10.9 kwh/nm 3 HHV - sg = 0.6 Oxygen: 90-100% purity Stated pressures are indicative. Actual pressures
Integration of Pedestrian Traffic Signal Control within SCOOT-UTC Systems
 Traffic Advisory Leaflet 2/09 April 2009 Integration of Pedestrian Traffic Signal Control within SCOOT-UTC Systems Introduction SCOOT 1,2,3 (Split Cycle and Offset Optimisation Technique) is an adaptive
Traffic Advisory Leaflet 2/09 April 2009 Integration of Pedestrian Traffic Signal Control within SCOOT-UTC Systems Introduction SCOOT 1,2,3 (Split Cycle and Offset Optimisation Technique) is an adaptive
TWENTY-SECOND MEETING OF THE ASIA/PACIFIC AIR NAVIGATION PLANNING AND IMPLEMENTATION REGIONAL GROUP (APANPIRG/22)
") INTERNATIONAL CIVIL AVIATION ORGANIZATION TWENTY-SECOND MEETING OF THE ASIA/PACIFIC AIR NAVIGATION PLANNING AND IMPLEMENTATION REGIONAL GROUP (APANPIRG/22) Bangkok, Thailand, 5-9 September 2011 Agenda
INTERNATIONAL CIVIL AVIATION ORGANIZATION TWENTY-SECOND MEETING OF THE ASIA/PACIFIC AIR NAVIGATION PLANNING AND IMPLEMENTATION REGIONAL GROUP (APANPIRG/22) Bangkok, Thailand, 5-9 September 2011 Agenda
Schedule Compression by Fair Allocation Methods
 Schedule Compression by Fair Allocation Methods by Michael Ball Andrew Churchill David Lovell University of Maryland and NEXTOR, the National Center of Excellence for Aviation Operations Research November
Schedule Compression by Fair Allocation Methods by Michael Ball Andrew Churchill David Lovell University of Maryland and NEXTOR, the National Center of Excellence for Aviation Operations Research November
Happy passengers. Lower operational costs.
 Happy passengers. Lower operational costs. www.scanfly.aero Fast. Easy. Retrofit. Self Bag Drop is key for a fast and efficient passenger handling process. Airports and airlines worldwide acknowledge the
Happy passengers. Lower operational costs. www.scanfly.aero Fast. Easy. Retrofit. Self Bag Drop is key for a fast and efficient passenger handling process. Airports and airlines worldwide acknowledge the
Axe and Saw Permit: Safe Use of Axes
 Page 1 of 7 Objective: The objective of this workshop guide is for the Scout Leader and/or Scout youth to be able to describe and demonstrate safe use of the Axe. Axe or Hatchet: What s the difference?
Page 1 of 7 Objective: The objective of this workshop guide is for the Scout Leader and/or Scout youth to be able to describe and demonstrate safe use of the Axe. Axe or Hatchet: What s the difference?
ATM STRATEGIC PLAN VOLUME I. Optimising Safety, Capacity, Efficiency and Environment AIRPORTS AUTHORITY OF INDIA DIRECTORATE OF AIR TRAFFIC MANAGEMENT
 AIRPORTS AUTHORITY OF INDIA ATM STRATEGIC PLAN VOLUME I Optimising Safety, Capacity, Efficiency and Environment DIRECTORATE OF AIR TRAFFIC MANAGEMENT Version 1 Dated April 08 Volume I Optimising Safety,
AIRPORTS AUTHORITY OF INDIA ATM STRATEGIC PLAN VOLUME I Optimising Safety, Capacity, Efficiency and Environment DIRECTORATE OF AIR TRAFFIC MANAGEMENT Version 1 Dated April 08 Volume I Optimising Safety,
Video Media Center - VMC 1000 Getting Started Guide
 Video Media Center - VMC 1000 Getting Started Guide Video Media Center - VMC 1000 Getting Started Guide Trademark Information Polycom, the Polycom logo design, Video Media Center, and RSS 2000 are registered
Video Media Center - VMC 1000 Getting Started Guide Video Media Center - VMC 1000 Getting Started Guide Trademark Information Polycom, the Polycom logo design, Video Media Center, and RSS 2000 are registered
SAVE THESE INSTRUCTIONS.
 IMPORTANT SAFEGUARDS When using electrical appliances, basic safety precautions should always be followed including the following: 1. Read all instructions. Every user should read this manual. 2. To protect
IMPORTANT SAFEGUARDS When using electrical appliances, basic safety precautions should always be followed including the following: 1. Read all instructions. Every user should read this manual. 2. To protect
PHY 133 Lab 6 - Conservation of Momentum
 Stony Brook Physics Laboratory Manuals PHY 133 Lab 6 - Conservation of Momentum The purpose of this lab is to demonstrate conservation of linear momentum in one-dimensional collisions of objects, and to
Stony Brook Physics Laboratory Manuals PHY 133 Lab 6 - Conservation of Momentum The purpose of this lab is to demonstrate conservation of linear momentum in one-dimensional collisions of objects, and to
NORTHFIELD CORPORATION 1870 COMMERCE DR. DE PERE, WI UNITED STATES
 1 MANUFACTURER: MODEL: NORTHFIELD CORPORATION 1870 COMMERCE DR. DE PERE, WI 54115 UNITED STATES NORTHFIELD CLS SPECIFICATIONS: VOLTAGE: FREQUENCY: CURRENT: AIR: 115VAC-230VAC 50/60Hz 5 AMP 80 PSI (for
1 MANUFACTURER: MODEL: NORTHFIELD CORPORATION 1870 COMMERCE DR. DE PERE, WI 54115 UNITED STATES NORTHFIELD CLS SPECIFICATIONS: VOLTAGE: FREQUENCY: CURRENT: AIR: 115VAC-230VAC 50/60Hz 5 AMP 80 PSI (for
AIRPORT OF THE FUTURE
 AIRPORT OF THE FUTURE Airport of the Future Which airport is ready for the future? IATA has launched a new activity, working with industry partners, to help define the way of the future for airports. There
AIRPORT OF THE FUTURE Airport of the Future Which airport is ready for the future? IATA has launched a new activity, working with industry partners, to help define the way of the future for airports. There
DANUBE FAB real-time simulation 7 November - 2 December 2011
 EUROCONTROL DANUBE FAB real-time simulation 7 November - 2 December 2011 Visitor Information DANUBE FAB in context The framework for the creation and operation of a Functional Airspace Block (FAB) is laid
EUROCONTROL DANUBE FAB real-time simulation 7 November - 2 December 2011 Visitor Information DANUBE FAB in context The framework for the creation and operation of a Functional Airspace Block (FAB) is laid
TWELFTH AIR NAVIGATION CONFERENCE
 International Civil Aviation Organization 17/5/12 WORKING PAPER TWELFTH AIR NAVIGATION CONFERENCE Montréal, 19 to 30 November 2012 Agenda Item 4: Optimum Capacity and Efficiency through global collaborative
International Civil Aviation Organization 17/5/12 WORKING PAPER TWELFTH AIR NAVIGATION CONFERENCE Montréal, 19 to 30 November 2012 Agenda Item 4: Optimum Capacity and Efficiency through global collaborative
Office of Aviation Enforcement and Proceedings
 Office of Aviation Enforcement and Proceedings Webinar on the Requirements of the Final Rule on Kiosk Accessibility Hosted by Airports Council International-North America (ACI-NA) December 17, 2013 2:00
Office of Aviation Enforcement and Proceedings Webinar on the Requirements of the Final Rule on Kiosk Accessibility Hosted by Airports Council International-North America (ACI-NA) December 17, 2013 2:00
(HELICOPTER FORCE LANDED AND BURNT OUT AFTER ENGINE FIRE WARNINGS)
") Follow-up Action on Occurrence Report ACCIDENT TO SIKORSKY S61N, G-BBHM, AT POOLE, DORSET ON 15 JULY 2002 (HELICOPTER FORCE LANDED AND BURNT OUT AFTER ENGINE FIRE WARNINGS) CAA FACTOR NUMBER : F21/2004
Follow-up Action on Occurrence Report ACCIDENT TO SIKORSKY S61N, G-BBHM, AT POOLE, DORSET ON 15 JULY 2002 (HELICOPTER FORCE LANDED AND BURNT OUT AFTER ENGINE FIRE WARNINGS) CAA FACTOR NUMBER : F21/2004
Pan Pacific Hotels Group rolls out Milestone IP video technology to ensure guest safety
 Pan Pacific Hotels Group rolls out Milestone IP video technology to ensure guest safety Pan Pacific, managed by Pan Pacific Hotels Group, is a leading hospitality brand in Asia and the Pacific Rim, situated
Pan Pacific Hotels Group rolls out Milestone IP video technology to ensure guest safety Pan Pacific, managed by Pan Pacific Hotels Group, is a leading hospitality brand in Asia and the Pacific Rim, situated
Enabling Civilian Low-Altitude Airspace and Unmanned Aerial System (UAS) Operations. Unmanned Aerial System Traffic Management (UTM)
 Operations. Unmanned Aerial System Traffic Management (UTM)") Enabling Civilian Low-Altitude Airspace and Unmanned Aerial System (UAS) Operations By Unmanned Aerial System Traffic Management (UTM) Parimal Kopardekar, Ph.D. UTM Principal Investigator and Manager,
Enabling Civilian Low-Altitude Airspace and Unmanned Aerial System (UAS) Operations By Unmanned Aerial System Traffic Management (UTM) Parimal Kopardekar, Ph.D. UTM Principal Investigator and Manager,
Garrecht TRX 1500 Traffic-Sensor
 SECTION 9 Pilot s Operating Handbook Supplement Garrecht TRX 1500 Traffic-Sensor This supplement is applicable and must be integrated into the Airplane Flight Manual if a Garrecht Traffic-Sensor is installed
SECTION 9 Pilot s Operating Handbook Supplement Garrecht TRX 1500 Traffic-Sensor This supplement is applicable and must be integrated into the Airplane Flight Manual if a Garrecht Traffic-Sensor is installed
PSS VM 7.15 announcement
 PSS VM 7.15 announcement New Mainframe Software Print SubSystem VM 7.15 AFP printing to PCL and PostScript Version 7.15 Bar Code Update with additional features and fixes 2880 Bagsvaerd Tel.: +45 4436
PSS VM 7.15 announcement New Mainframe Software Print SubSystem VM 7.15 AFP printing to PCL and PostScript Version 7.15 Bar Code Update with additional features and fixes 2880 Bagsvaerd Tel.: +45 4436
The Development and Analysis of a Wind Turbine Blade
 ME 461: Finite Element Analysis Spring 2016 The Development and Analysis of a Wind Turbine Blade Group Members: Joel Crawmer, Edward Miller, and Eros Linarez Department of Mechanical and Nuclear Engineering,
ME 461: Finite Element Analysis Spring 2016 The Development and Analysis of a Wind Turbine Blade Group Members: Joel Crawmer, Edward Miller, and Eros Linarez Department of Mechanical and Nuclear Engineering,
Dräger Bodyguard II Warning Device
 Dräger Bodyguard II Warning Device The Dräger Bodyguard II is a fully electronic signal and warning unit for use with compressed air breathing apparatus and closedcircuit breathing apparatus. Combining
Dräger Bodyguard II Warning Device The Dräger Bodyguard II is a fully electronic signal and warning unit for use with compressed air breathing apparatus and closedcircuit breathing apparatus. Combining
Quick Start Guide 3500 AquaVent
 Quick Start Guide 3500 AquaVent Please read this document carefully before using the AquaVent. High Quality Groundwater and Surface Water Monitoring Instrumentation Note: For information on using your
Quick Start Guide 3500 AquaVent Please read this document carefully before using the AquaVent. High Quality Groundwater and Surface Water Monitoring Instrumentation Note: For information on using your
GAMA/Build A Plane 2017 Aviation Design Challenge
 GAMA/Build A Plane 2017 Aviation Design Challenge UPDATE TO 2017 INSTRUCTIONS & DUE DATE Issue: Design changes made to the Cessna 172SP.acf aircraft file originally specified for the competition are not
GAMA/Build A Plane 2017 Aviation Design Challenge UPDATE TO 2017 INSTRUCTIONS & DUE DATE Issue: Design changes made to the Cessna 172SP.acf aircraft file originally specified for the competition are not
PRAJWAL KHADGI Department of Industrial and Systems Engineering Northern Illinois University DeKalb, Illinois, USA
 SIMULATION ANALYSIS OF PASSENGER CHECK IN AND BAGGAGE SCREENING AREA AT CHICAGO-ROCKFORD INTERNATIONAL AIRPORT PRAJWAL KHADGI Department of Industrial and Systems Engineering Northern Illinois University
SIMULATION ANALYSIS OF PASSENGER CHECK IN AND BAGGAGE SCREENING AREA AT CHICAGO-ROCKFORD INTERNATIONAL AIRPORT PRAJWAL KHADGI Department of Industrial and Systems Engineering Northern Illinois University
Flight control checks Flight Control Events
 Operational Liaison Meeting Fly-By-Wire Aircraft 2004 Flight control checks Flight Control Events Customer Services Contents Introduction Typical Flight Control Events Enhanced SOP F/CTL CHECKS Conclusion
Operational Liaison Meeting Fly-By-Wire Aircraft 2004 Flight control checks Flight Control Events Customer Services Contents Introduction Typical Flight Control Events Enhanced SOP F/CTL CHECKS Conclusion
TWELFTH AIR NAVIGATION CONFERENCE
 International Civil Aviation Organization AN-Conf/12-WP/8 7/5/12 WORKING PAPER TWELFTH AIR NAVIGATION CONFERENCE Montréal, 19 to 30 November 2012 Agenda Item 3: Interoperability and data through globally
International Civil Aviation Organization AN-Conf/12-WP/8 7/5/12 WORKING PAPER TWELFTH AIR NAVIGATION CONFERENCE Montréal, 19 to 30 November 2012 Agenda Item 3: Interoperability and data through globally
Propulsion Solutions for Fishing Vessels SERVICES
 Propulsion Solutions for Fishing Vessels SERVICES Propulsion Solutions for Fishing Vessels Wärtsilä propulsion systems have been developed to provide outstanding reliability, low operating costs, environmental
Propulsion Solutions for Fishing Vessels SERVICES Propulsion Solutions for Fishing Vessels Wärtsilä propulsion systems have been developed to provide outstanding reliability, low operating costs, environmental
Gulfstream continually stretches the boundaries of business aviation. With the all-new Gulfstream G600, we shift the aviation paradigm to offer
 Gulfstream continually stretches the boundaries of business aviation. With the all-new Gulfstream G600, we shift the aviation paradigm to offer optimized performance in speed and range. The G600 airframe
Gulfstream continually stretches the boundaries of business aviation. With the all-new Gulfstream G600, we shift the aviation paradigm to offer optimized performance in speed and range. The G600 airframe
Official Journal of the European Union L 186/27
 7.7.2006 Official Journal of the European Union L 186/27 COMMISSION REGULATION (EC) No 1032/2006 of 6 July 2006 laying down requirements for automatic systems for the exchange of flight data for the purpose
7.7.2006 Official Journal of the European Union L 186/27 COMMISSION REGULATION (EC) No 1032/2006 of 6 July 2006 laying down requirements for automatic systems for the exchange of flight data for the purpose
The Challenge of Surface Conditions. AST: A New Solution to a Global Aviation Problem. Benefits and Business Value to Airports and Operators
 The Challenge of Surface Conditions AST: A New Solution to a Global Aviation Problem Benefits and Business Value to Airports and Operators 2 3 Runway excursions are among the most-frequently reported accidents
The Challenge of Surface Conditions AST: A New Solution to a Global Aviation Problem Benefits and Business Value to Airports and Operators 2 3 Runway excursions are among the most-frequently reported accidents
Saw Blade Lube Systems
 Environmentally Friendly Lubrication Saw Blade Lube Systems Cutting Edge Technology Saw Blade Lube Systems Cutting Edge Technology Cutting Edge Technology Unist saw blade lubrication systems deliver all
Environmentally Friendly Lubrication Saw Blade Lube Systems Cutting Edge Technology Saw Blade Lube Systems Cutting Edge Technology Cutting Edge Technology Unist saw blade lubrication systems deliver all
Official Journal of the European Union L 146/7
 8.6.2007 Official Journal of the European Union L 146/7 COMMISSION REGULATION (EC) No 633/2007 of 7 June 2007 laying down requirements for the application of a flight message transfer protocol used for
8.6.2007 Official Journal of the European Union L 146/7 COMMISSION REGULATION (EC) No 633/2007 of 7 June 2007 laying down requirements for the application of a flight message transfer protocol used for
EPM Series Reversing Electric Actuators
 EPM Series Reversing Electric Actuators Innovative Quarter-Turn Actuators that Look the Same on the Outside with the Hayward Difference on the INSIDE! Overview On/Off and Proportional Control Models Designed
EPM Series Reversing Electric Actuators Innovative Quarter-Turn Actuators that Look the Same on the Outside with the Hayward Difference on the INSIDE! Overview On/Off and Proportional Control Models Designed
CAPAN Methodology Sector Capacity Assessment
 CAPAN Methodology Sector Capacity Assessment Air Traffic Services System Capacity Seminar/Workshop Nairobi, Kenya, 8 10 June 2016 Raffaele Russo EUROCONTROL Operations Planning Background Network Operations
CAPAN Methodology Sector Capacity Assessment Air Traffic Services System Capacity Seminar/Workshop Nairobi, Kenya, 8 10 June 2016 Raffaele Russo EUROCONTROL Operations Planning Background Network Operations
The Transforming Airport
 DAY 2 FOUR PATHWAYS The Transforming Airport Distributed Airport Infrastructure Airport infrastructure; Creating greater choice and convenience for passengers is driving the trend for off-airport facilities.
DAY 2 FOUR PATHWAYS The Transforming Airport Distributed Airport Infrastructure Airport infrastructure; Creating greater choice and convenience for passengers is driving the trend for off-airport facilities.
ECLIPSE TORQUE WRENCHES
 TORQUE WRENCHES ECLIPSE TORQUE WRENCHES RATCHET HEAD Torque Mechanism Accuracy of +/- 3% exceeds all international standards for torque wrenches. Each wrench is supplied with a traceable calibration certificate
TORQUE WRENCHES ECLIPSE TORQUE WRENCHES RATCHET HEAD Torque Mechanism Accuracy of +/- 3% exceeds all international standards for torque wrenches. Each wrench is supplied with a traceable calibration certificate
Installation & Operation Manual VHM Variable Height Series Arms with Fixed Angle Front End
 3875 Cypress Drive Petaluma, CA 94954 800.228.2555 707.773.1100 Fax 707.773.1180 www.gcx.com Installation & Operation Manual VHM Variable Height Series Arms with Fixed Angle Front End Products covered
3875 Cypress Drive Petaluma, CA 94954 800.228.2555 707.773.1100 Fax 707.773.1180 www.gcx.com Installation & Operation Manual VHM Variable Height Series Arms with Fixed Angle Front End Products covered
You recognize it immediately. The shape, the name, the quality. The Harman. P-Series gives you the heat you want when you want it.
 P - S E R I E S P e l l e t S t o v e s The Smartest pellet stoves on the market Decorative plated or brushed air grilles (optional) Sealed hopper holds up to 76 pounds of pellets State-of-the-art, whisperquiet,
P - S E R I E S P e l l e t S t o v e s The Smartest pellet stoves on the market Decorative plated or brushed air grilles (optional) Sealed hopper holds up to 76 pounds of pellets State-of-the-art, whisperquiet,
Tradition and innovation
 Wärtsilä Auxpac Tradition and innovation The Wärtsilä Auxpac generating sets are the most compact and lightweight generating sets available on the market. The compact design of the generating set simplifies
Wärtsilä Auxpac Tradition and innovation The Wärtsilä Auxpac generating sets are the most compact and lightweight generating sets available on the market. The compact design of the generating set simplifies
212iLM Mullion (ILLUMINATED WEATHER RESISTANT) Keypad
 Keypad") International Electronics, Inc. 427 Turnpike Street Canton, Massachusetts 02021 212iLM Mullion (ILLUMINATED WEATHER RESISTANT) Keypad Stand Alone Keypad-Installation Manual Features: 120 User Capability
International Electronics, Inc. 427 Turnpike Street Canton, Massachusetts 02021 212iLM Mullion (ILLUMINATED WEATHER RESISTANT) Keypad Stand Alone Keypad-Installation Manual Features: 120 User Capability
Safety Enhancement SE ASA Design Virtual Day-VMC Displays
 Safety Enhancement SE 200.2 ASA Design Virtual Day-VMC Displays Safety Enhancement Action: Implementers: (Select all that apply) Statement of Work: Manufacturers develop and implement virtual day-visual
Safety Enhancement SE 200.2 ASA Design Virtual Day-VMC Displays Safety Enhancement Action: Implementers: (Select all that apply) Statement of Work: Manufacturers develop and implement virtual day-visual
SLIDING WINDOW & DOOR LOCK
 AUSTRALIA Patents Act 1990 COMPLETE SPECIFICATIONS INNOVATION PATENT SLIDING WINDOW & DOOR LOCK INVENTOR: MR GHASSAN HADDAD G.J.N.R. HOLDINGS PTY LTD (ACN 135 397 312) 1 SLIDING WINDOW LOCK Inventor: Mr
AUSTRALIA Patents Act 1990 COMPLETE SPECIFICATIONS INNOVATION PATENT SLIDING WINDOW & DOOR LOCK INVENTOR: MR GHASSAN HADDAD G.J.N.R. HOLDINGS PTY LTD (ACN 135 397 312) 1 SLIDING WINDOW LOCK Inventor: Mr
Flexible Pavement Design
 Flexible Pavement Design FAARFIELD 1.3 Workshop Starting Screen No Job Files Created Click on New Job Presented to: VI ALACPA Airport Pavements Seminar & IV FAA Workshop By: David R. Brill, P.E., Ph.D.
Flexible Pavement Design FAARFIELD 1.3 Workshop Starting Screen No Job Files Created Click on New Job Presented to: VI ALACPA Airport Pavements Seminar & IV FAA Workshop By: David R. Brill, P.E., Ph.D.
Manual for External Batch/Screw Counter (NEX-PLC) for Screw Feeder FM-36
 for Screw Feeder FM-36") Manual for External Batch/Screw Counter (NEX-PLC) for Screw Feeder FM-36 1.Summary This counter can interface with Screw Feeder FM-36 by setting the number of batches/screws, to be fed, directly into this
Manual for External Batch/Screw Counter (NEX-PLC) for Screw Feeder FM-36 1.Summary This counter can interface with Screw Feeder FM-36 by setting the number of batches/screws, to be fed, directly into this
MODEL AERONAUTICAL ASSOCIATION OF AUSTRALIA
 MODEL AERONAUTICAL ASSOCIATION OF AUSTRALIA FIRST PERSON VIEW (FPV) AND SELF GUIDED MODEL AIRCRAFT POLICY MOP066 PPROVED: MAAA PRESIDENT Date: 10/08/2016 Amendments made to MOP066 Paragraph Brief description
MODEL AERONAUTICAL ASSOCIATION OF AUSTRALIA FIRST PERSON VIEW (FPV) AND SELF GUIDED MODEL AIRCRAFT POLICY MOP066 PPROVED: MAAA PRESIDENT Date: 10/08/2016 Amendments made to MOP066 Paragraph Brief description
DEPARTMENT OF CIVIL AVIATION Airworthiness Notices EXTENDED DIVERSION TIME OPERATIONS (EDTO)
") EXTENDED DIVERSION TIME OPERATIONS (EDTO) 1. APPLICABILITY 1.1 This notice is applicable to operator engaged in Commercial Air Transport Operations beyond the threshold time established by DCA for EDTO
EXTENDED DIVERSION TIME OPERATIONS (EDTO) 1. APPLICABILITY 1.1 This notice is applicable to operator engaged in Commercial Air Transport Operations beyond the threshold time established by DCA for EDTO
Firenet to Contain Prescribed Burns and Protect Property
 Firenet to Contain Prescribed Burns and Protect Property Design Team Oyedotun Ajewole, Alex Cooley Veena Kothapalli, Eng Ly Design Advisor Prof. Yiannis Levendis Abstract Traditional methods of combating
Firenet to Contain Prescribed Burns and Protect Property Design Team Oyedotun Ajewole, Alex Cooley Veena Kothapalli, Eng Ly Design Advisor Prof. Yiannis Levendis Abstract Traditional methods of combating
SPEDESTER Series QUICK REFERENCE GUIDE
 Spedester series Digital DC Drives come with an extensive range of standard software blocks, it can take control of the most demanding motion control tasks. Designed for industrial applications, Spedester
Spedester series Digital DC Drives come with an extensive range of standard software blocks, it can take control of the most demanding motion control tasks. Designed for industrial applications, Spedester
Mazdaspeed6 Stage 1 Location 2 OCC Kit Install guide
 1 Mazdaspeed6 Stage 1 Location 2 OCC Kit Install guide WARNING: By installing this Product, you understand that: The buyer/user assumes all risk as to quality, performance and use of these products and
1 Mazdaspeed6 Stage 1 Location 2 OCC Kit Install guide WARNING: By installing this Product, you understand that: The buyer/user assumes all risk as to quality, performance and use of these products and
Abstract. Introduction
 COMPARISON OF EFFICIENCY OF SLOT ALLOCATION BY CONGESTION PRICING AND RATION BY SCHEDULE Saba Neyshaboury,Vivek Kumar, Lance Sherry, Karla Hoffman Center for Air Transportation Systems Research (CATSR)
COMPARISON OF EFFICIENCY OF SLOT ALLOCATION BY CONGESTION PRICING AND RATION BY SCHEDULE Saba Neyshaboury,Vivek Kumar, Lance Sherry, Karla Hoffman Center for Air Transportation Systems Research (CATSR)