Rule 110 objects and other collision-based constructions
|
|
|
- Rosemary Bradley
- 5 years ago
- Views:
Transcription
1 Rule 110 objects and other collision-based constructions Genaro Juárez Martínez 1, Harold V. McIntosh 2, Juan C. S. T. Mora 3 and Sergio V. C. Vergara 4 September 1, Departamento de Posgrado, Escuela Superior de Cómputo, Instituto Politécnico Nacional, México DF. genarojm@correo.unam.mx 2 Departamento de Aplicación de Microcomputadoras, Instituto de Ciencias, Universidad Autónoma de Puebla, Puebla, México. mcintosh@servidor.unam.mx 3 Centro de Investigación Avanzada en Ingeniería Industrial, Universidad Autónoma del Estado de Hidalgo Pachuca, Hidalgo, México. jseck@uaeh.reduaeh.mx 4 Sección Computación, Departamento de Ingeniería Eléctrica, Centro de Investigación y de Estudios Avanzados del IPN, México DF. schapa@cs.cinvestav.mx Abstract The one-dimensional cellular automaton Rule 110 shows a very ample and diversified glider dynamics. The huge number of collision-based reactions presented in its evolution space are useful to implement some specific (conventional and unconventional) computable process, hence Rule 110 may be used to implement any desired simulation. Therefore there is necessity of defining some interesting objects as: solitons, eaters, black holes, flip-flops, fuses and more. For example, this work explains the construction of meta-gliders; for these constructions, we specify a regular language in Rule 110 to code in detail initial conditions with a required behavior. The paper depicts as well several experimental collision-based constructions. 1 Introduction The present manuscript constitutes a continuation from our previous results explained at Gliders in Rule 110 [6]. In this way, we continue utilizing Cook s Journal of Cellular Automata, in press,
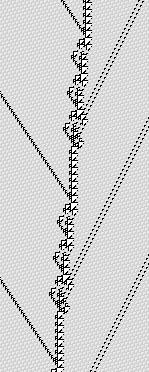
2 notation to identify gliders and we use as well our regular language [7] to code phase-based initial conditions. 1 Using the above conventions, the construction of objects in Rule 110 will be discussed and explained. The objects are formed by two or more collision-based gliders, where their multiple reactions yield the production of a specific object in the evolution space of Rule 110. Applying this paradigm, some base objects will be constructed to show both their utility in procedures explored in our previous work and their possible potential applications. For example, the objects can be seen as components whose eventual synchronization realizes a particular task. One special case in Rule 110 is the presence of soliton reactions [8]; they are relevant to preserve information and for conserving operators in the implementation of a cyclic tag system [3, 17]. We shall analyze this phenomenon in binary reactions. The paper is organized in the following way: section 2 describes the construction of meta-gliders, section 3 explains the composition of large triangles, section 4 exposes the definition of solitons and section 5 studies the production of several Rule 110 objects. The codification of the regular expressions (using phases f i i) defining the whole set of constructions proposed in this work is given at a final appendix. 2 Constructing meta-gliders Several gliders in Rule 110 are able to form meta-gliders by means of a careful synchronization of different reactions in the evolution space, as a large lattice in Rule 110. With de Bruijn diagrams we can find distinct lattices with diverse tiles (see Figure 8 of [6]). But now the constructions are more complicated because we need to synchronize various reactions at the same time. Two examples of meta-gliders are displayed in Figure 1. Figure 1 (a) shows a triple collision between A, D 1 and C 1 gliders. The A glider crosses as soliton and the collision produces the D 1 and C 1 gliders, something interesting is that the A glider helps to maintain the other collisions in a suitable phase adjusting each production. Figure 1 (b) is more simple, it uses many glider gun s so to cancel B gliders by A gliders emitted periodically. Now we show the construction of three meta-gliders with long period (figure 2). Each meta-glider has two evolutions. The first picture (left evolution) has an evolution with a small initial condition in order to determine the phenomenon with boundary properties, the following picture (right evolution) displayed the construction for a space of arbitrary size. Our first construction is in Figure 2 (a) showing a reaction between a B glider and an Ē glider which is almost a soliton, because A and B gliders are 1 An explanation of the regular language and electronic file is available from 2
, the regular expression constructs a meta-glider with almost the same soliton effect.")

3 cancelled and the Ē glider goes on with an extra B glider (left evolution). In the second picture (right evolution), the regular expression constructs a meta-glider with almost the same soliton effect. Here it is important to introduce a sequence of ether to establish a suitable distance for conserving the synchronization. The B glider may just interact in two ways with the Ē glider for producing the same result, which facilitates the construction of this meta-glider using any phase in both gliders. (a) (b) Figure 1: Meta-gliders in Rule 110. The second construction in Figure 2 (b) shows a cycle defined by F and B gliders, producing again a B glider and a F glider. Then the B glider collides the new F glider yielding another B glider cancelled by an A glider. In this example it is more difficult to see these collisions but all of them are conserved, one can see a best reaction-structure giving more distance mod 4 (by tiles) or mod 14 (by cells) between F and B gliders. Our third example in Figure 2 (c) is a little bit different and is realized with A s, B and F gliders. The phenomenon is particularly interesting because it can simulate a square-potential wall taking adequate initial conditions [12]. A particle bounces in the wall without crossing it, then having the correct phase and distance parameters, the particle crosses the wall simulating a tunnel effect. The B glider may cross one F glider at least in one collision, this phenomenon is obtained working with the distances among gliders for controlling the final result. The production begins with a collision between a F and B gliders, producing a D 1 and a package of A 2 gliders, then these gliders collide regenerating the F and B gliders. In the meta-glider it is clear to see how the A s and B gliders oscillate in their central parts, like a membrane configuration [9]. 3
")


4 (a) (b) (c) Figure 2: Meta-gliders with long period. 4
 depicts the periodic behavior with boundary properties and four reactions.")
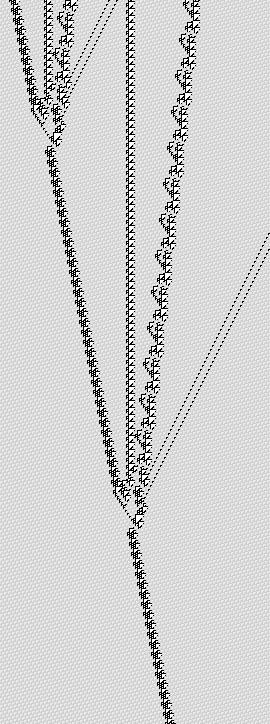
5 Another interesting example is displayed in Figure 3 illustrating a periodic or non-periodic meta-glider in its construction. The first picture (left evolution) depicts the periodic behavior with boundary properties and four reactions. The second picture (right evolution), depicts its non-periodic behavior with multiple reactions. This example requires a really laborious codification for the initial condition and it is a good example of synchronizing collisions for a number of gliders in the evolution space of Rule 110. Thus we have two parts: the first one by two separated A gliders and a package of A 4 gliders; the second is formed by a B, a package of B 2 gliders and an E glider merged with an Ē glider. Figure 3: Periodic and non-periodic meta-glider The production begins with the A and B gliders which should produce two 5
6 merged Ē gliders. But the second A glider coming from the left, transforms the Ē into an E glider, and the B 2 gliders arriving from the right yield the A 4 and Ē gliders, leaving the E merged with the Ē glider. The package of A4 gliders collide with the E and Ē gliders returning to the sequence of B, A, A and B 2 gliders, starting a new cycle of reactions. We observe as well that the cycle can be interpreted as a soliton-reaction because the package of A 4 gliders crosses in each collision as two A gliders, conversely the two A gliders cross as a package of A 4 gliders (each with double period). On the other hand the B and B 2 gliders cross like a soliton the E and Ē gliders after each collision of double period, and the E and Ē gliders return to the B and B 2 gliders, i.e., the opposite case. 3 Constructing large triangles McIntosh has appointed two relevant problems to Rule 110. The first is characterizing the covering of the evolution space with tiles and the second is to determine the largest tile produced by collisions in Rule 110 [11]. Brute-force computations looking for ancestors establish initial conditions to construct the T 43, T 44 and T 45 tiles, and a careful revision of the de Bruijn diagram for several generations determined that it is not possible construct tiles greater than T 45 after 9 generations; this limit was established in August 2001 [11]. Later, at December 2002, Cook constructed tiles with size T n for 27 n 33 through non-periodic sequences in the initial conditions. Every sequence determines a particular tile and in some cases the change of one or two bits in the sequence produces an equal or smaller tile. We have analyzed this problem an finding that tiles T 24, T 25, T 26, T 28, T 29 y T 30 can be generated by glider collisions. Tiles with a size smaller than 21 appears with more frequency in the evolution space and they easily rise from random initial conditions. Figure 4 presents a production for each tile. In order to obtain a tile T 26 we need a C 1, a F, and an E 3 glider specified by an E and two B gliders, and finally a package of 6B gliders. In this case, as in other problems in Rule 110, the change of one structure in only one index induces a complete variation in the final production. For instance, if the C 1 glider is replaced by a C 2 or C 3 glider, the tile T 26 is not composed; only in a very few cases this kind of change yields a larger tile. To bear a tile T 28 we need four spaced C 1 gliders, an Ē and a B glider for controlling the right chaotic region and generate the tile. In this case the absence of the B glider in the required phase determines the full disappearance of T 28, not even creating a closer tile. For getting a tile T 29 we require a package of A 5 gliders colliding with two joined F gliders, but a few steps before a B glider interacts with the second F and a G glider determines the right margin building the T 29. The tile T 29 was calculated in 276 generations and when the initial condition was formulated, an out-of-phase glider produced accidently a tile T 30. Thus the sequence reproducing the T 30 is the same that the one for the T 29 ; just an extra 6






7 A glider at the left is demanded. Some variations of this expression may produce tiles T 16, T 20 and T 22. T 24 T 25 T 26 T 28 T 29 T 30 Figure 4: Producing large collision-based triangles. However, we can say that in the formation of tiles T 29 and T 30 there is a non-proper collision, because there exists a B glider between a pair of slower F and G glider. In this way we must determine if there is a production providing the B and G glider for harmonizing a proper collision. Open problems are the generation of tiles T 27, and T 31,...,42 by means of collisions. 7
![4 Solitons in Rule 110 Rule 110 can be able of simulating the soliton phenomenon in a natural way. This one was observed by a systematic analysis making all binary collisions between gliders [5].](/docs-images/81/83807022/images/8-0.jpg "Solitons and collisions in general are applied to realize conventional or unconventional computation transmitting information [2].")
8 4 Solitons in Rule 110 Rule 110 can be able of simulating the soliton phenomenon in a natural way. This one was observed by a systematic analysis making all binary collisions between gliders [5]. Solitons and collisions in general are applied to realize conventional or unconventional computation transmitting information [2]. For example, Cook uses several soliton-reactions in Rule 110 for constructing the cyclic tag system [3]. 2 Figure 5: Pseudo-soliton with F, B and B gliders A soliton is characterized by two arbitrary constants determining speed and amplitude, a variable defines the soliton coordinate in a given time and the unitary vector determines its polarization (or phase). The special meaning of solitons is that in a certain way they determine the asymptotic state of an arbitrary solution. Thus, solitons are stable in the sense that small changes in its initial conditions yield small changes in its parameters [8]. 2 You can see a full simulation of the cyclic tag system in the evolution space of Rule 110 from section cyclic tag system. 8
9 Different types of soliton-reactions can be constructed in Rule 110 [5]. Packages of solitons can be interpreted as meta-gliders, because we may have several different gliders interacting as solitons; although the synchronization is really complicated in many cases. All binary soliton-reactions between gliders are enumerated in our appendix and they will be discussed in a next paper. In this subject we have a special case that we call pseudo-soliton originated by the reaction F B = B F and F B = B F. Then B glider is transformed into a B glider which even if conserves its speed, it does not have the same form. The transformation is possible because B glider has 1/11 possibilities of returning into a B colliding against a F glider as Figure 5 shows. But, we have a limitation in this example because is not possible to insert other F glider to the left and continue the pseudo-soliton-reaction, because the second B cannot produce another B glider in any possible case, thus the restriction is that we have not periodic productions after of two solitons. Let us remember that the models until now known in cellular automata theory, do not have any direct relation with solutions of non-integrated partial differential equations. Some important results trying to establish such a relation can be consulted by Kenneth Steiglitz [13, 8]. For example, multiple collisions of the soliton type between several gliders can help to construct computable systems, like the Manakov s model [8] or excitable models [1]. In the next section we discussed some applications of solitons for the cyclic tag system. 5 Rule 110 objects Many years of research in Life have been dedicated for the search and construction of different objects, some of them simple and others very complicated [2, 4]. Several objects found by different investigators in a number of years allowed finally the specification of a Turing machine in Life [2] (by Paul Rendell). Therefore the exploration and definition of simple and complex objects will help to solve open problems in Rule 110. For example, implementing a Turing machine, self-reproducing components, intrinsic universal systems and an universal constructor between others. The representation in the one-dimensional case is significantly different that in two or three dimension because we have an auxiliary two-dimensional evolution space. Nevertheless, the constructions are equally exhibited. You can see an ingenious representation by Andrew Wuensche with animation of rings for the one-dimensional case applying the DDLAB system. 3 All reactions like reflections, eaters, annihilations, solitons, black holes, fuses and more are totally identifiable (although it is necessary a previous experience in the operation of one-dimensional cellular automata)
 (d)")




10 (a) (b) (c) (d) (e) (f) Figure 6: Six black holes patterns in Rule
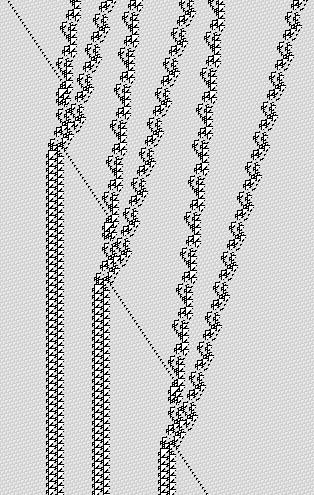
11 5.1 Black holes Now we present gliders which periodically absorb gliders, better known as black holes. In these constructions distances can vary, but the important thing is to conserve the collision absorbing gliders from left to right. Figure 6 show six examples, all of them absorbing only A and B gliders. The first case in Figure 6 (a) illustrates the collision among C 3 and B gliders producing an E glider, the E receives an A glider returning it into a C 3 glider. The distance between A gliders is always mod 3 (according to the ether background) and for the B glider only a phase is necessary. The second black hole in Figure 6 (b) is produced between a D 1 against a B glider yielding an E glider, this in turn collides against an A producing again the D 1 glider similar to the previous example. The difference is the C 3 glider instead of the D 1. The third case in Figure 6 (c) is a mixture of the two previous examples. This black hole oscillates in its central part between C 3, E and D 1 gliders. The fourth example in Figure 6 (d) is a more elaborated collision and we must take care about a suitable distance to obtain the desire construction. A C 2 glider collides against a B producing a D 1 glider. Next, an A collides the D 1 producing a small chaotic region that should produce a C 2 glider. But a B arriving from the right before time does not allow it and produces a D 1 glider, absorbing the A and B gliders beginning a new cycle of reactions. 4 The fifth black hole in Figure 6 (e) is a collision among C 1 gliders against B gliders producing a C 2 that will be quickly transformed. In this case the arriving A eliminates the C 2 glider immediately returning to a C 1. In a long way the sequence of collisions should be: C 1 B = C 2 A C 2 = C 1. The last black hole in Figure 6 (f) absorbs pairs of A and B gliders. A package of A 2 gliders colliding against a C 2 produces a F glider, then a package of B 2 collides with the F returning to the C 2. Up to now, we have not found other black holes absorbing another type of gliders; suggesting that they will be more rare or sophisticated with a very long period. 5.2 Eaters Rule 110 has gliders which eat other gliders without leaving any rest. For example, at the cyclic tag system, we can find an object eating gliders. 5 In the first case a D 1 and a package of A 3 gliders delete Ē gliders in each collision (figure 7 (a)). The same phenomenon can be reproduced with a D 2 and A 2 gliders as it is seen in Figure 7 (b). The third case deletes as well Ē gliders but now with a C 1 and a package of A 5 gliders (Figure 7 (c)). The fourth case in Figure 7 (d) is between a pair of 4 The original cycle must be among C 2 and D 1 gliders, but with a B glider we avoid the existence of C 2, thus the original production is: C 2 B = D 1 and A D 1 = C 2. 5 See section cyclic tag system or [3, 17]. 11
 (d)")
")




12 (a) (b) (c) (d) (e) (f) (g) Figure 7: Seven eater patterns in Rule
13 Ē s and an A glider, this one deletes both Ē gliders and continues its trajectory with a delay. Our fifth example in Figure 7 (e) eliminates a pair of C gliders, they are a C 3 and a C 2 hitting an Ē glider. The first collision between C 3 and Ē generates five B gliders (that will be deleted quickly), besides the C 2 produces a D 1 after colliding against the B 3 gliders returning into the Ē. This production is repeated for each pair of C s forming an Ē with a minimal distance of 3e configurations (mod 42) between C gliders. The sixth eater in Figure 7 (f) is significantly different from the previous ones because there is an interval needed to synchronize a triple collision between D 1, C 2 and Ē gliders (p+, p 0 and p slopes, see [6]) with an interval constant growing in an exponential factor of 3 n e (for all n > 0) between each D 1 and C 2 gliders. Then they are eliminated by an Ē glider at each collision. The evolution shows three different collisions, nevertheless, the final reaction is the same one. The last eater in Figure 7 (g) is even more complicated. The elimination of gliders was yielded by a glider of positive slope p +. Thus a D 1 eats a C 3 with a F and two B gliders, showing a four-tuple reaction! Some collisions among gliders cause an annihilation reaction [5]. The simplest case is the collision between A against B gliders where both disappear. The same phenomenon may be observed in one of the three possible collisions between an A against a B glider. Another example is a pair of C 2 s eliminated by a B or a B glider. 5.3 Fuses Rule 110 has fuse configurations as well, they are produced by consecutive collisions and some of them are very interesting as Figure 8 illustrates. One can extract several examples of fuse configurations from de Bruijn diagrams for 10 generations (see full patterns in Figure 8 from [6]). The phenomenon is generated when a periodic sequence into a cycle change to another cycle (or more), then the evolution space is composed by two different patterns. The first example in Figure 8 (a) is constructed between an A against a B glider. The collision produces two merged C 3 gliders; the important thing is that the A gliders survival and continue, thus we can always repeat this process (describing a path among two or more cycles into de Bruijn diagram; this path has a direct correspondence with a regular expression of our regular language L R110 [7]). The second fuse in Figure 8 (b) is with an A glider colliding with a package of two E s producing a D 1 glider and a very small chaotic region. Later the intervention of other A glider in the right contact point allows to return to the two E gliders. The A glider arrives at two different phases with a constant distance of 2e and e configurations, producing in the process a package of A 2 gliders merged by the collision among the D 1 and E gliders. The third fuse figure 8 (c) is with a Ē glider and B gliders arriving from the right. The first collision produces a package of B 3 gliders. The second B glider produces a C 1 glider hitting at the same time against a package of A 4 13
 (d)")
")




14 (a) (b) (c) (d) (e) (f) (g) Figure 8: Seven fuse patterns in Rule
15 gliders and with the third B glider we return to the original Ē glider. The fourth example in Figure 8 (d) also produces packages of B 3 but now with C 2 and G gliders. The fifth case in Figure 8 (e) begins with a D 1 against a G glider. The result are a G and a C 3 glider. As the G glider is preserved after the collision, we just added more D 1 gliders to obtain this same change. The distance between each D 1 glider is the minimum needed to conserve the structure. Nevertheless, it is possible to extend the distance to obtain a clearer presentation of G. The sixth fuse in Figure 8 (f) is more complicated because we need a triple reaction with three different slopes, producing a pair of merged C 3 s as in the first fuse. But in this construction, the intervals among F and Ē gliders grow by an exponential factor of 2 n e (for all n 0) for each collision. The reactions may be stopped with the same gliders changing the phase of the last Ē without producing other gliders. The seventh fuse in Figure 8 (g) is another triple collision among D 1, C 2 and Ē gliders producing a C 2 with a C 3 glider. Again, the important problem is to adjust the interval among the D 1 and the C 2 glider. 5.4 Flip-flop A flip-flop configuration in Life is a stationary periodic structure oscillating with period two (period three or superior are knowing as blinkers [14]). This patterns represent as well the value of signals in the design of circuits. In order to represent a flip-flop pattern in Rule 110 we need several interacting gliders, i.e., the implementation is not realized by a unique glider (as the case of Life with a line of three live cells). For example, Figure 9 displays evolutions that may be interpreted as flip-flop configurations. In the first example of Figure 9 (a) we initiated with an E 2 colliding a C 2 producing an Ē glider. In order to return into E2 the Ē collides against two C 2 gliders. In this production there is an exceeding C 1. Thus the flip-flop construction is between E 2 Ē gliders; although the device is not reusable. The second example in Figure 9 (b) illustrates the oscillation between Ē and F gliders. To obtain the result we have the Ē glider colliding with two C 3 producing a F with two stationary C 1 and C 2 gliders. The C 1 hit the previous F producing a C 2 glider. In order to return to Ē the F must collide against a C 1 glider. Again, the device is not reusable to future reactions. 5.5 Applying some useful Rule 110 objects In Rule 110 we have some periodic objects that can be useful to construct a desired process; nevertheless, a search for obtaining additional valuable objects must be done. Rule 110 offers a wide variety of these objects. An immediate application of Rule 110 objects was realized by Cook in several stages for developing the cyclic tag system [3]. Next we displayed some of them illustrating their constructions. 15


16 (a) (b) Figure 9: Two flip-flop patterns in Rule

17 Figure 10: Some Rule 110 objects of the cyclic tag system representing operators and data. 17

18 Figure 11: Some Rule 110 objects of the cyclic tag system deleting signals and preparing new data. 18
19 Figure 10 illustrates two important reactions of the cyclic tag system. There is a reaction with A 4 gliders which are preserved as solitons crossing an Ē (other soliton); they maybe will not be immediately taking part of the system and will be subsequently used. A second reaction packing A 4 gliders transform each Ē into C 2 gliders, they are interpreted like data on the tape. The central part is very important to simulate the cyclic tag system in Rule 110 because it represents the interaction among operators and data arriving from the right transformed previously by blocks of E s. The second evolution (Figure 11), packages Ē gliders periodically transformed by a C 3 and a pair of C 1 gliders. The blocks of Ē gliders are converted into other data blocks (consisting of only four Ē gliders) representing values in the tape on colliding with the package of A 4 gliders. All reactions begin with a D 1 arriving from left. In both examples we can identify collisions controlled in different stages. Local or general synchronization is determined by distances and phases. Although the implementation in Rule 110 is impressive, many details must be discussed to suitably reproduce the cyclic tag system (you can analyze the full simulation and multiple details for each stage, see footnote 2). In Figure 11 the first evolution is another example of the cyclic tag system illustrating that a simple construction can be combined with others to elaborate a specific operation. It starts with a group of four C 2 s representing data and they are erased by an Ē yielding two A s used in other collisions. In the figure, two blocks of C 2 gliders are erased. The second evolution constructs a cycle between E and a pair of C 2 gliders, producing periodically one A glider. The third evolution is similar but here there are two different C s gliders for returning into an Ē in each collision. The last example is constructed with two previous knowing reactions. Figure 12 shows a set of collisions that can be interpreted as a logic not gate; although the device cannot be employed again. To modify data on the type with 0 s and 1 s, we utilize the collision of two pairs of Ē s and an A glider. Thus a collision with the A deletes a pair of Ē s representing a 1 0 transformation other possibility is that the pair of Ē s crosses as a soliton indicating a 0 1 conversion. 6 Conclusions Rule 110 have an incredible number of reactions into the evolution space. We can think about an infinity number of collisions in two ways: with packages of gliders (g 1 ng 2 ) or with extensible gliders (g 1 g n 2 ). The diversity of reactions allows to investigate the simulation of several complicated process, for instance conventional or unconventional computing procedures [1], solitons (particle machines) [8], self-reproduction [15] and artificial life [14]. In this sense, we have developed an useful computational tool for specifying any reaction by coding initial conditions with regular expressions [7]. De Bruijn diagrams have been analyzed [10, 16] to calculate some simple 19
20 data basic reaction Figure 12: Simulating a simple NOT gate with Rule 110. objects, but eventually a new way implementing specialized searches must be formulated. Another further work is to investigate the potential applications of the Rule 110 objects on unconventional computing. Acknowledgements In special to Matthew Cook and Fred Lunnon. Important commentaries and observations were made by Paul Chapman, David Hillman and Markus Redeker. This work was realized with CONACyT support with register number
21 References [1] Andrew Adamatzky, Computing in Nonlinear Media and Automata Collectives, Institute of Physics Publishing, Bristol and Philadelphia, (ISBN X) [2] Andrew Adamatzky (Ed.), Collision-Based Computing, Springer, (ISBN ) [3] Matthew Cook, Universality in Elementary Cellular Automata, Complex Systems, Volume 15, Number 1, pp. 1-40, [4] David Griffeath and Cristopher Moore, New Constructions in Cellular Automata, (Santa Fe Institute Studies on the Sciences of Complexity) Oxford University Press, April (ISBN ) [5] Genaro J. Martínez and Harold V. McIntosh, ATLAS: Collisions of gliders like phases of ether in Rule 110, August [6] Genaro J. Martínez, Harold V. McIntosh and Juan C. S. T. Mora, Gliders in Rule 110, International Journal of Unconventional Computing, Volume 2, Number 1, 2006, pp. 1-49, January [7] Genaro J. Martínez, Harold V. McIntosh, Juan C. S. T. Mora and Sergio V. C. Vergara, Determining a regular language by glider-based structures called phases f i 1 in Rule 110, in elaboration. [8] Mariusz H. Jakubowski, Ken Steiglitz and Richard Squier, Computing with Solitons: A Review and Prospectus, Multiple-Valued Logic, Special Issue on Collision-Based Computing, vol. 6, Numbers 5-6, (ISSN ) [9] Harold V. McIntosh, Linear Cellular Automata, cinvestav.mx/~mcintosh/oldweb/pautomata.html, [10] Harold V. McIntosh, Rule 110 as it relates to the presence of gliders, January [11] Harold V. McIntosh, A Concordance for Rule 110, [12] Albert Messiah, Mecánica Cuántica, Tomo I, Editorial Tecnos, Madrid, [13] James K. Park, Kenneth Steiglitz and William P. Thurston, Soliton-like behavior in automata, Physica D 19, ,
22 [14] William Poundstone, The Recursive Universe, William Morrow and Company, Inc. New York, (ISBN ) [15] John von Neumann, Theory of Self-reproducing Automata (edited and completed by A. W. Burks), University of Illinois Press, Urbana and London [16] Burton H. Voorhees, Computational analysis of one-dimensional cellular automata, World Scientific Series on Nonlinear Science, Series A, Vol. 15, (ISBN ) [17] Stephen Wolfram, A New Kind of Science, Wolfram Media, Inc., Champaign, Illinois, (ISBN ) A Appendix A.1 Table 1 Meta-gliders Relation of productions constructing meta gliders. 1. {A(f 3 1)-3e-A(f 2 1)-3e-A(f 1 1)}*-e-D 1 (A,f 1 1)-C 2 (A,f 1 1)-{e-A(f 1 1)-e-D 1 (A,f 1 1)- C 2 (A,f 1 1)}* 2. {gun(a,f 1 1)-e}* 3. (a) Ē(A,f 1 1)-e-B(f 1 1) (b) {Ē(A,f 1 1)-B(f 1 1)-e}* 4. (a) F (A,f 1 1)-e-B(f 1 1) (b) {F (A,f 1 1)-e-B(f 1 1)-e}* 5. (a) F (H,f 1 1)-e-B(f 1 1) (b) {F (H,f 1 1)-e-B(f 1 1)-e}* 6. (a) A(f 3 1)-e-A(f 1 1)-e- B(C,f 1 1)-e-2B(f 4 1) (b) A 4 (f 3 1)-8e-A(f 3 1)-e-A(f 1 1)-8e-A 4 (f 1 1)-7e-A(f 1 1)-e-A(f 2 1)-2e- B(A,f 1 1)- e-b(f 1 1)-B(f 4 1)-E(B,f 2 1)-Ē(G,f 1 1)-5e- B(C,f 1 1)-e-B(f 1 1)-B(f 4 1)- e-e(a,f 2 1)-Ē(A,f 4 1) A.2 Table 2 Solitons Relation of productions generating all the possible solitons by binary collisions. Solitons 1. A Ē gliders (a) A(f 1 1)-e-Ē(C,f 1 1) 22
23 (b) A(f 1 1)-e-Ē(D,f 1 1) (c) A(f 1 1)-e-Ē(E,f 1 1) (d) A(f 1 1)-e-Ē(H,f 1 1) 2. A G gliders (a) A(f 1 1)-e-G(A2,f 1 1) 3. C 1 Ē and C 1 F gliders (a) C 1 (A,f 1 1)-e-Ēr(A,f 1 1) (b) C 1 (A,f 1 1)-e-Ē(D,f 1 1) (c) C 1 (A,f 1 1)-e-F (A,f 1 1) 4. C 2 Ē and C 2 F gliders (a) C 2 (A,f 1 1)-e-Ē(A,f 1 1) (b) C 2 (A,f 1 1)-e-F (B,f 1 1) 5. F B gliders (a) F (A2,f 1 1)-e-B(f 1 1) 6. F Ē gliders (a) F (A,f 1 1)-e-Ē(A,f 1 1) (b) F (A,f 1 1)-e-Ē(C,f 1 1) (c) F (A,f 1 1)-e-Ē(D,f 1 1) (d) F (A,f 1 1)-e-Ē(E,f 1 1) (e) F (G,f 1 1)-e-Ē(A,f 1 1) (f) F (G,f 1 1)-e-Ē(B,f 1 1) (g) F (G,f 1 1)-e-Ē(H,f 1 1) Pseudo-soliton 1. F B B gliders (a) F (G,f 3 1)-2e-F (A,f 1 1)-e-B(f 1 1)-5e- B(B,f 4 1) A.3 Table 3 Large triangles Relation of productions yielding large tiles by collisions. Tiles T n<20 are found in the list of all the binary collisions between gliders [5]. T 20 : D 1 (A,f 1 1)-e-C 2 (A,f 1 1)-e-Ē(C,f 1 1)-2e-2B(f 3 1) T 21 : A(f 3 1)-4e-D 2 (C,f 1 1)-C 2 (B,f 1 1)-2e-B(f 1 1)-4B(f 2 1) 23
24 T 22 : D 1 (A,f 1 1)-e-C 2 (A,f 1 1)-e-Ē(C,f 1 1)-2e-4B(f 3 1) T 23 : D 2 (B,f 2 1)-D 2 (A,f 4 1)-8e-E(B,f 1 1)-10B(f 4 1) T 24 : C 3 (B,f 1 1)-C 2 (A,f 1 1)-C 2 (A,f 1 1)-e-G(A,f 1 1)-G(C2,f 1 1) T 25 : D 2 (B,f 2 1)-D 2 (A,f 4 1)-5e-E(B,f 1 1)-11B(f 1 1) T 26 : C 1 (A,f 1 1)-2e-F (A,f 1 1)-e-E(D,f 1 1)-2B(f 1 1)-2e-6B(f 4 1) T 28 : C 1 (B,f 1 1)-C 1 (A,f 4 1)-C 1 (A,f 1 1)-C 1 (B,f 1 1)-e-Ē(D,f 1 1)-2e-B(f 3 1) T 29 : A 5 (f 1 1)-6e-F (B,f 1 1)-F (G,f 1 1)-B(f 4 1)-G(F,f 4 1) T 30 : A(f 1 1)-e-A 5 (f 1 1)-6e-F (B,f 1 1)-F (G,f 1 1)-B(f 4 1)-G(F,f 4 1) A.4 Table 4 Objects Relation of productions specifying Rule 110 objects. Black holes 1. {A(f 2 1)-3e-A(f 2 1)-3e-A(f 3 1)-3e-A(f 1 1)-3e-A(f 2 1)-3e-A(f 1 1)-3e}*-C 3 (A,f 2 1)- B(f 3 1)* 2. {A(f 2 1)-2e-A(f 3 1)-2e-A(f 1 1)-2e}*-D 1 (A,f 1 1)-{e-B(f 1 1)}* 3. {A(f 1 1)-3e}*-C 3 (f 1 1)-B(f 3 1)* 4. {A(f 1 1)-3e}*-C 2 (A,f 1 1)-B(f 1 1)-e-{2e-B(f 1 1)-2e-B(f 3 1)}* 5. {A(f 1 1)-e}*-e-C 1 (A,f 2 1)-{B(f 2 1)}* 6. {8e-A 2 (f 1 1)}*-e-C 2 (A,f 1 1)-3e-B 2 (f 4 1)-3e-B 2 (f 3 1)-4e-B 2 (f 2 1) Eaters 1. D 1 (B,f 2 1)-e-Ē(A,f 1 1)-Ē(A,f 3 1)-Ē(B,f 1 1)-Ē(A,f 1 1)-Ē(A,f 3 1)-Ē(B,f 1 1)- Ē(A,f 3 1)-Ē(A,f 2 1) 2. D 2 (A,f 1 1)-Ē(A,f 1 1)-Ē(C,f 3 1)-Ē(A,f 3 1)-{Ē(B,f 3 1)-Ē(A,f 2 1)}* 3. C 1 (A,f 1 1)-e-{Ē(C,f 1 1)-Ē(D,f 1 1)-Ē(B,f 1 1)-Ē(C,f 1 1)-Ē(E,f 1 1)-Ē(D,f 3 1)}* 4. A(f 1 1)-{2e-Ē(A,f 1 1)-Ē(G,f 4 1)}* 5. {3e-C 2 (A,f 1 1)-C 3 (A,f 1 1)}*-e-Ē(B,f 1 1) 6. D 1 (A,f 1 1)-9e-C 2 (A,f 1 1)-D 1 (B,f 2 1)-3e-C 2 (A,f 1 1)-D 1 (B,f 2 1)-e-C 2 (A,f 1 1)- e-ē(a,f 2 1) 7. D 1 (A,f 3 1)-e-C 3 (A,f 2 1)-F (A,f 1 1)-2e-2B(f 1 1)-C 3 (B,f 1 1)-3e-F (D,f 3 1)-13e- 2B(f 4 1) 24
25 Fuses 1. A(f 1 1)-{3e- B(A,f 1 1)-3e- B(B,f 1 1)-3e- B(C,f 1 1)}* 2. {A(f 3 1)-2e-A(f 1 1)-e}*-E(C,f 3 1)-E(D,f 4 1) 3. Ē(A,f 1 1)-{B(f 3 1)-B(f 2 1)-e-B(f 1 1)-e-B(f 4 1)}* 4. C 2 (A,f 1 1)-G(F,f 1 1)-G(C,f 2 1)-G(E,f 4 1)-G(A,f 2 1)-G(A2,f 1 1)-G(A,f 1 1)- G(E,f 2 1)-G(B,f 3 1)-G(E,f 1 1) 5. {D 1 (A,f 1 1)-e}*-G(H,f 1 1) 6. A(f 1 1)-4e-F (H,f 1 1)-e-Ē(G,f 3 1)-F (A,f 1 1)-2e-Ē(C,f 3 1)-e-F (E,f 1 1)-4e-Ē(H,f 1 1) 7. D 1 (A,f 3 1)-5e-C 2 (A,f 1 1)-D 1 (B,f 3 1)-2e-C 2 (B,f 1 1)-D 1 (A,f 1 1)-e-C 2 (A,f 1 1)- e-ē(a,f 1 1) Flip-flop 1. {3e-C 2 (B,f 1 1)-C 2 (A,f 4 1)-3e-C 2 (A,f 1 1)}*-e-E(A,f 1 1)-B(f 1 1) 2. {e-c 1 (A,f 1 1)-2e-C 1 (B,f 3 1)-C 3 (A,f 1 1)}*-e-Ē(A,f 1 1) Computational objects 1. A 4 (f 3 1)-13e-A 4 (f 2 1)-13e-A 4 (f 1 1)-e-Ē(B,f 1 1)-e-Ē(D,f 3 1)-2e-Ē(C,f 1 1)-2e- Ē(H,f 2 1)-2e-Ē(E,f 1 1)-2e-Ē(C,f 1 1) 2. D 1 (C,f 3 1)-e-Ē(B,f 1 1)-Ē(C,f 1 1)-Ē(D,f 1 1)-e-Ē(B,f 1 1)-Ē(D,f 1 1)-e-Ē(B,f 1 1)- e-ē(h,f 1 1)-Ē(B,f 1 1)-e-Ē(D,f 1 1)-e-Ē(B,f 1 1)-Ē(D,f 1 1)-e-Ē(B,f 1 1)-e-Ē(H,f 1 1) 3. {4e-C 2 (A,f 1 1)-e-C 2 (B,f 1 1)-e-C 2 (A,f 1 1)-e-C 2 (A,f 1 1)}*-e-Ē(C,f 1 1) 4. {2e-C 2 (A,f 1 1)-e-C 2 (B,f 1 1)}*-e-E(A,f 1 1) 5. {3e-C 2 (B,f 1 1)-C 1 (A,f 1 1)}*-e-Ē(B,f 1 1) 6. A(f 1 1)-2e-Ē(A,f 1 1)-Ē(G,f 4 1)-2e-Ē(A,f 1 1)-Ē(H,f 1 1)-2e-Ē(H,f 1 1)-Ē(G,f 1 1)- 2e-Ē(D,f 1 1)-Ē(B,f 4 1)-2e-Ē(D,f 1 1)-Ē(C,f 1 1)-2e-Ē(B,f 1 1)-Ē(H,f 4 1)-2e- Ē(A,f 1 1)-Ē(G,f 4 1) 25
Text Encryption Based on Glider in the Game of Life
 International Journal of Information Science 26, 6(): 2-27 DOI:.5923/j.ijis.266.2 Text Encryption Based on Glider in the Game of Life Majid Vafaei Jahan *, Faezeh Khosrojerdi Mashhad Branch, Islamic Azad
International Journal of Information Science 26, 6(): 2-27 DOI:.5923/j.ijis.266.2 Text Encryption Based on Glider in the Game of Life Majid Vafaei Jahan *, Faezeh Khosrojerdi Mashhad Branch, Islamic Azad
New Approach to Search for Gliders in Cellular Automata
 New Approach to Search for Gliders in Cellular Automata E. Sapin Faculty of Computing, Engineering and Mathematical Sciences, University of the West of England, Bristol BS16 1QY, UK emmanuelsapin@hotmail.com
New Approach to Search for Gliders in Cellular Automata E. Sapin Faculty of Computing, Engineering and Mathematical Sciences, University of the West of England, Bristol BS16 1QY, UK emmanuelsapin@hotmail.com
PHY 133 Lab 6 - Conservation of Momentum
 Stony Brook Physics Laboratory Manuals PHY 133 Lab 6 - Conservation of Momentum The purpose of this lab is to demonstrate conservation of linear momentum in one-dimensional collisions of objects, and to
Stony Brook Physics Laboratory Manuals PHY 133 Lab 6 - Conservation of Momentum The purpose of this lab is to demonstrate conservation of linear momentum in one-dimensional collisions of objects, and to
arxiv: v1 [nlin.cg] 8 Sep 2017
![arxiv: v1 [nlin.cg] 8 Sep 2017](/thumbs/91/107469673.jpg "arxiv: v1 [nlin.cg] 8 Sep 2017") Minimal Glider-Gun in a 2D Cellular Automaton arxiv:1709.02655v1 [nlin.cg] 8 Sep 2017 José Manuel Gómez Soto Universidad Autónoma de Zacatecas. Unidad Académica de Matemáticas. Zacatecas, Zac. México.
Minimal Glider-Gun in a 2D Cellular Automaton arxiv:1709.02655v1 [nlin.cg] 8 Sep 2017 José Manuel Gómez Soto Universidad Autónoma de Zacatecas. Unidad Académica de Matemáticas. Zacatecas, Zac. México.
Important! You need to print out the 2 page worksheet you find by clicking on this link and take it with you to your lab session.
 1 PHY 123 Lab 5 - Linear Momentum (updated 10/9/13) In this lab you will investigate the conservation of momentum in one-dimensional collisions of objects. You will do this for both elastic and inelastic
1 PHY 123 Lab 5 - Linear Momentum (updated 10/9/13) In this lab you will investigate the conservation of momentum in one-dimensional collisions of objects. You will do this for both elastic and inelastic
A Turing Machine In Conway's Game Life. Paul Rendell
 A Turing Machine in Conway's Game Life 30/08/01 Page 1 of 8 A Turing Machine In Conway's Game Life. Paul Rendell I have constructed a Turing Machine in Conway s Game Life (figure 1). In this paper I describes
A Turing Machine in Conway's Game Life 30/08/01 Page 1 of 8 A Turing Machine In Conway's Game Life. Paul Rendell I have constructed a Turing Machine in Conway s Game Life (figure 1). In this paper I describes
UC Berkeley Working Papers
 UC Berkeley Working Papers Title The Value Of Runway Time Slots For Airlines Permalink https://escholarship.org/uc/item/69t9v6qb Authors Cao, Jia-ming Kanafani, Adib Publication Date 1997-05-01 escholarship.org
UC Berkeley Working Papers Title The Value Of Runway Time Slots For Airlines Permalink https://escholarship.org/uc/item/69t9v6qb Authors Cao, Jia-ming Kanafani, Adib Publication Date 1997-05-01 escholarship.org
Air Track Collisions
 PC1141 Physics I Air Track Collisions 1 Objectives Determine the velocity and momentum of each glider before and after the collision from which the total momentum of the system before and after the collision
PC1141 Physics I Air Track Collisions 1 Objectives Determine the velocity and momentum of each glider before and after the collision from which the total momentum of the system before and after the collision
EA-12 Coupled Harmonic Oscillators
 Introduction EA-12 Coupled Harmonic Oscillators Owing to its very low friction, an Air Track provides an ideal vehicle for the study of Simple Harmonic Motion (SHM). A simple oscillator assembles with
Introduction EA-12 Coupled Harmonic Oscillators Owing to its very low friction, an Air Track provides an ideal vehicle for the study of Simple Harmonic Motion (SHM). A simple oscillator assembles with
An Analysis of Dynamic Actions on the Big Long River
 Control # 17126 Page 1 of 19 An Analysis of Dynamic Actions on the Big Long River MCM Team Control # 17126 February 13, 2012 Control # 17126 Page 2 of 19 Contents 1. Introduction... 3 1.1 Problem Background...
Control # 17126 Page 1 of 19 An Analysis of Dynamic Actions on the Big Long River MCM Team Control # 17126 February 13, 2012 Control # 17126 Page 2 of 19 Contents 1. Introduction... 3 1.1 Problem Background...
PRAJWAL KHADGI Department of Industrial and Systems Engineering Northern Illinois University DeKalb, Illinois, USA
 SIMULATION ANALYSIS OF PASSENGER CHECK IN AND BAGGAGE SCREENING AREA AT CHICAGO-ROCKFORD INTERNATIONAL AIRPORT PRAJWAL KHADGI Department of Industrial and Systems Engineering Northern Illinois University
SIMULATION ANALYSIS OF PASSENGER CHECK IN AND BAGGAGE SCREENING AREA AT CHICAGO-ROCKFORD INTERNATIONAL AIRPORT PRAJWAL KHADGI Department of Industrial and Systems Engineering Northern Illinois University
American Airlines Next Top Model
 Page 1 of 12 American Airlines Next Top Model Introduction Airlines employ several distinct strategies for the boarding and deboarding of airplanes in an attempt to minimize the time each plane spends
Page 1 of 12 American Airlines Next Top Model Introduction Airlines employ several distinct strategies for the boarding and deboarding of airplanes in an attempt to minimize the time each plane spends
A Study on Berth Maneuvering Using Ship Handling Simulator
 Proceedings of the 29 IEEE International Conference on Systems, Man, and Cybernetics San Antonio, TX, USA - October 29 A Study on Berth Maneuvering Using Ship Handling Simulator Tadatsugi OKAZAKI Research
Proceedings of the 29 IEEE International Conference on Systems, Man, and Cybernetics San Antonio, TX, USA - October 29 A Study on Berth Maneuvering Using Ship Handling Simulator Tadatsugi OKAZAKI Research
HOW TO IMPROVE HIGH-FREQUENCY BUS SERVICE RELIABILITY THROUGH SCHEDULING
 HOW TO IMPROVE HIGH-FREQUENCY BUS SERVICE RELIABILITY THROUGH SCHEDULING Ms. Grace Fattouche Abstract This paper outlines a scheduling process for improving high-frequency bus service reliability based
HOW TO IMPROVE HIGH-FREQUENCY BUS SERVICE RELIABILITY THROUGH SCHEDULING Ms. Grace Fattouche Abstract This paper outlines a scheduling process for improving high-frequency bus service reliability based
o " tar get v moving moving &
 Introduction You have a summer job at Amtrak with a group examining the crash between two trains. Your supervisor wants you to calculate the results of two different cases. The first is a perfectly inelastic
Introduction You have a summer job at Amtrak with a group examining the crash between two trains. Your supervisor wants you to calculate the results of two different cases. The first is a perfectly inelastic
Impact of Landing Fee Policy on Airlines Service Decisions, Financial Performance and Airport Congestion
 Wenbin Wei Impact of Landing Fee Policy on Airlines Service Decisions, Financial Performance and Airport Congestion Wenbin Wei Department of Aviation and Technology San Jose State University One Washington
Wenbin Wei Impact of Landing Fee Policy on Airlines Service Decisions, Financial Performance and Airport Congestion Wenbin Wei Department of Aviation and Technology San Jose State University One Washington
Demonstration of the Universality of a New Cellular Automaton
 Int. J. of Unconventional Computing, Vol. X, pp. 1 25 Reprints available directly from the publisher Photocopying permitted by license only c 2006 Old City Publishing, Inc. Published by license under the
Int. J. of Unconventional Computing, Vol. X, pp. 1 25 Reprints available directly from the publisher Photocopying permitted by license only c 2006 Old City Publishing, Inc. Published by license under the
The X-rule: universal computation in a non-isotropic Life-like Cellular Automaton arxiv: v2 [nlin.cg] 26 Apr 2015
![The X-rule: universal computation in a non-isotropic Life-like Cellular Automaton arxiv: v2 [nlin.cg] 26 Apr 2015](/thumbs/87/95374607.jpg "The X-rule: universal computation in a non-isotropic Life-like Cellular Automaton arxiv: v2 [nlin.cg] 26 Apr 2015") The X-rule: universal computation in a non-isotropic Life-like Cellular Automaton arxiv:1504.01434v2 [nlin.cg] 26 Apr 2015 José Manuel Gómez Soto Universidad Autónoma de Zacatecas. Unidad Académica de
The X-rule: universal computation in a non-isotropic Life-like Cellular Automaton arxiv:1504.01434v2 [nlin.cg] 26 Apr 2015 José Manuel Gómez Soto Universidad Autónoma de Zacatecas. Unidad Académica de
Simulation of disturbances and modelling of expected train passenger delays
 Computers in Railways X 521 Simulation of disturbances and modelling of expected train passenger delays A. Landex & O. A. Nielsen Centre for Traffic and Transport, Technical University of Denmark, Denmark
Computers in Railways X 521 Simulation of disturbances and modelling of expected train passenger delays A. Landex & O. A. Nielsen Centre for Traffic and Transport, Technical University of Denmark, Denmark
A Universal Turing Machine in Conway s Game of Life
 A Universal Turing Machine in Conway s Game of Life Paul Rendell Department of Computer Science University of the West of England paul@rendell-attic.org ABSTRACT In this paper we present a Universal Turing
A Universal Turing Machine in Conway s Game of Life Paul Rendell Department of Computer Science University of the West of England paul@rendell-attic.org ABSTRACT In this paper we present a Universal Turing
7-Nov-15 PHYS Elastic Collision. To study the laws of conservation of momentum and energy in an elastic collision. Glider 1, masss m 1.
 Objective Elastic Collision To study the laws of conservation of momentum and energy in an elastic collision. Introduction If no net external force acts on a system of particles, the total linear momentum
Objective Elastic Collision To study the laws of conservation of momentum and energy in an elastic collision. Introduction If no net external force acts on a system of particles, the total linear momentum
Estimating the Risk of a New Launch Vehicle Using Historical Design Element Data
 International Journal of Performability Engineering, Vol. 9, No. 6, November 2013, pp. 599-608. RAMS Consultants Printed in India Estimating the Risk of a New Launch Vehicle Using Historical Design Element
International Journal of Performability Engineering, Vol. 9, No. 6, November 2013, pp. 599-608. RAMS Consultants Printed in India Estimating the Risk of a New Launch Vehicle Using Historical Design Element
Pre-lab questions: Physics 1AL CONSERVATION OF MOMENTUM Spring Introduction
 Introduction You have a summer job at Amtrak with a group examining the crash between two trains. Your supervisor wants you to calculate the results of two different cases. The first is a perfectly inelastic
Introduction You have a summer job at Amtrak with a group examining the crash between two trains. Your supervisor wants you to calculate the results of two different cases. The first is a perfectly inelastic
ABSTRACT TIES TO CURRICULUM TIME REQUIREMENT
 ABSTRACT This lesson uses the thrill of amusement park attractions to teach students how to analyze principles of motion. The Calculator Based Laboratory helps students record and analyze acceleration
ABSTRACT This lesson uses the thrill of amusement park attractions to teach students how to analyze principles of motion. The Calculator Based Laboratory helps students record and analyze acceleration
A 3D simulation case study of airport air traffic handling
 A 3D simulation case study of airport air traffic handling Henk de Swaan Arons Erasmus University Rotterdam PO Box 1738, H4-21 3000 DR Rotterdam, The Netherlands email: hdsa@cs.few.eur.nl Abstract Modern
A 3D simulation case study of airport air traffic handling Henk de Swaan Arons Erasmus University Rotterdam PO Box 1738, H4-21 3000 DR Rotterdam, The Netherlands email: hdsa@cs.few.eur.nl Abstract Modern
Today: using MATLAB to model LTI systems
 Today: using MATLAB to model LTI systems 2 nd order system example: DC motor with inductance derivation of the transfer function transient responses using MATLAB open loop closed loop (with feedback) Effect
Today: using MATLAB to model LTI systems 2 nd order system example: DC motor with inductance derivation of the transfer function transient responses using MATLAB open loop closed loop (with feedback) Effect
Airline Boarding Schemes for Airbus A-380. Graduate Student Mathematical Modeling Camp RPI June 8, 2007
 Airline Boarding Schemes for Airbus A-380 Anthony, Baik, Law, Martinez, Moore, Rife, Wu, Zhu, Zink Graduate Student Mathematical Modeling Camp RPI June 8, 2007 An airline s main investment is its aircraft.
Airline Boarding Schemes for Airbus A-380 Anthony, Baik, Law, Martinez, Moore, Rife, Wu, Zhu, Zink Graduate Student Mathematical Modeling Camp RPI June 8, 2007 An airline s main investment is its aircraft.
Air Traffic Flow Management (ATFM) in the SAM Region METHODOLOGY ADOPTED BY BRAZIL TO CALCULATE THE CONTROL CAPACITY OF ACC OF BRAZILIAN FIR
 in the SAM Region METHODOLOGY ADOPTED BY BRAZIL TO CALCULATE THE CONTROL CAPACITY OF ACC OF BRAZILIAN FIR") International Civil Aviation Organization SAM/IG/6-IP/03 South American Regional Office 21/09/10 Sixth Workshop/Meeting of the SAM Implementation Group (SAM/IG/6) - Regional Project RLA/06/901 Lima, Peru,
International Civil Aviation Organization SAM/IG/6-IP/03 South American Regional Office 21/09/10 Sixth Workshop/Meeting of the SAM Implementation Group (SAM/IG/6) - Regional Project RLA/06/901 Lima, Peru,
THE IMPORTANCE OF THE RURAL TELEPHONE LINE SATELLITE IN MEXICO
 THE IMPORTANCE OF THE RURAL TELEPHONE LINE SATELLITE IN MEXICO Cirilo Gabino León Vega, Oscar Dolores Vázquez, Ramón Marín Solís Correo electrónico: cleonv@ipn.mx,oscarvazq@hotmail.com, rmarins@gmail.com
THE IMPORTANCE OF THE RURAL TELEPHONE LINE SATELLITE IN MEXICO Cirilo Gabino León Vega, Oscar Dolores Vázquez, Ramón Marín Solís Correo electrónico: cleonv@ipn.mx,oscarvazq@hotmail.com, rmarins@gmail.com
Cluster A.2: Linear Functions, Equations, and Inequalities
 A.2A: Representing Domain and Range Values: Taxi Trips Focusing TEKS A.2A Linear Functions, Equations, and Inequalities. The student applies mathematical process standards when using properties of linear
A.2A: Representing Domain and Range Values: Taxi Trips Focusing TEKS A.2A Linear Functions, Equations, and Inequalities. The student applies mathematical process standards when using properties of linear
A Multilayer and Time-varying Structural Analysis of the Brazilian Air Transportation Network
 A Multilayer and Time-varying Structural Analysis of the Brazilian Air Transportation Network Klaus Wehmuth, Bernardo B. A. Costa, João Victor M. Bechara, Artur Ziviani 1 National Laboratory for Scientific
A Multilayer and Time-varying Structural Analysis of the Brazilian Air Transportation Network Klaus Wehmuth, Bernardo B. A. Costa, João Victor M. Bechara, Artur Ziviani 1 National Laboratory for Scientific
FLIGHT OPERATIONS PANEL
 International Civil Aviation Organization FLTOPSP/WG/2-WP/14 27/04/2015 WORKING PAPER FLIGHT OPERATIONS PANEL WORKING GROUP SECOND MEETING (FLTOPSP/WG/2) Rome Italy, 4 to 8 May 2015 Agenda Item 4 : Active
International Civil Aviation Organization FLTOPSP/WG/2-WP/14 27/04/2015 WORKING PAPER FLIGHT OPERATIONS PANEL WORKING GROUP SECOND MEETING (FLTOPSP/WG/2) Rome Italy, 4 to 8 May 2015 Agenda Item 4 : Active
NOTES ON COST AND COST ESTIMATION by D. Gillen
 NOTES ON COST AND COST ESTIMATION by D. Gillen The basic unit of the cost analysis is the flight segment. In describing the carrier s cost we distinguish costs which vary by segment and those which vary
NOTES ON COST AND COST ESTIMATION by D. Gillen The basic unit of the cost analysis is the flight segment. In describing the carrier s cost we distinguish costs which vary by segment and those which vary
Quantitative Analysis of the Adapted Physical Education Employment Market in Higher Education
 Quantitative Analysis of the Adapted Physical Education Employment Market in Higher Education by Jiabei Zhang, Western Michigan University Abstract The purpose of this study was to analyze the employment
Quantitative Analysis of the Adapted Physical Education Employment Market in Higher Education by Jiabei Zhang, Western Michigan University Abstract The purpose of this study was to analyze the employment
Activity Template. Drexel-SDP GK-12 ACTIVITY. Subject Area(s): Sound Associated Unit: Associated Lesson: None
: Sound Associated Unit: Associated Lesson: None") Activity Template Subject Area(s): Sound Associated Unit: Associated Lesson: None Drexel-SDP GK-12 ACTIVITY Activity Title: What is the quickest way to my destination? Grade Level: 8 (7-9) Activity Dependency:
Activity Template Subject Area(s): Sound Associated Unit: Associated Lesson: None Drexel-SDP GK-12 ACTIVITY Activity Title: What is the quickest way to my destination? Grade Level: 8 (7-9) Activity Dependency:
Time Benefits of Free-Flight for a Commercial Aircraft
 Time Benefits of Free-Flight for a Commercial Aircraft James A. McDonald and Yiyuan Zhao University of Minnesota, Minneapolis, Minnesota 55455 Introduction The nationwide increase in air traffic has severely
Time Benefits of Free-Flight for a Commercial Aircraft James A. McDonald and Yiyuan Zhao University of Minnesota, Minneapolis, Minnesota 55455 Introduction The nationwide increase in air traffic has severely
VAR-501-WECC-3 Power System Stabilizer. A. Introduction
 A. Introduction 1. Title: Power System Stabilizer (PSS) 2. Number: VAR-501-WECC-3 3. Purpose: To ensure the Western Interconnection is operated in a coordinated manner under normal and abnormal conditions
A. Introduction 1. Title: Power System Stabilizer (PSS) 2. Number: VAR-501-WECC-3 3. Purpose: To ensure the Western Interconnection is operated in a coordinated manner under normal and abnormal conditions
A Statistical Method for Eliminating False Counts Due to Debris, Using Automated Visual Inspection for Probe Marks
 A Statistical Method for Eliminating False Counts Due to Debris, Using Automated Visual Inspection for Probe Marks SWTW 2003 Max Guest & Mike Clay August Technology, Plano, TX Probe Debris & Challenges
A Statistical Method for Eliminating False Counts Due to Debris, Using Automated Visual Inspection for Probe Marks SWTW 2003 Max Guest & Mike Clay August Technology, Plano, TX Probe Debris & Challenges
Motion 2. 1 Purpose. 2 Theory
 Motion 2 Equipment Capstone, motion sensor, meter stick, air track+ 2 gliders, 2 blocks, and index cards. Air Tracks In this experiment you will be using an air track. This is a long straight triangular
Motion 2 Equipment Capstone, motion sensor, meter stick, air track+ 2 gliders, 2 blocks, and index cards. Air Tracks In this experiment you will be using an air track. This is a long straight triangular
You Must Be At Least This Tall To Ride This Paper. Control 27
 You Must Be At Least This Tall To Ride This Paper Control 27 Page 1 of 10 Control 27 Contents 1 Introduction 2 2 Basic Model 2 2.1 Definitions............................................... 2 2.2 Commonly
You Must Be At Least This Tall To Ride This Paper Control 27 Page 1 of 10 Control 27 Contents 1 Introduction 2 2 Basic Model 2 2.1 Definitions............................................... 2 2.2 Commonly
Transfer Scheduling and Control to Reduce Passenger Waiting Time
 Transfer Scheduling and Control to Reduce Passenger Waiting Time Theo H. J. Muller and Peter G. Furth Transfers cost effort and take time. They reduce the attractiveness and the competitiveness of public
Transfer Scheduling and Control to Reduce Passenger Waiting Time Theo H. J. Muller and Peter G. Furth Transfers cost effort and take time. They reduce the attractiveness and the competitiveness of public
European Aviation Safety Agency 1 Sep 2008 OPINION NO 03/2008. of 1 September 2008
 European Aviation Safety Agency 1 Sep 2008 OPINION NO 03/2008 OF THE EUROPEAN AVIATION SAFETY AGENCY of 1 September 2008 for a Commission Regulation amending Regulation (EC) No 216/2008 of the European
European Aviation Safety Agency 1 Sep 2008 OPINION NO 03/2008 OF THE EUROPEAN AVIATION SAFETY AGENCY of 1 September 2008 for a Commission Regulation amending Regulation (EC) No 216/2008 of the European
STANDARDS MAP Basic Programs 1 and 2 English Language Arts Content Standards Grade Five
 : Pearson Program Title: Pearson California and Pearson California Components: : Teacher s Edition (TE), Student Edition (SE), Practice Book (PB); : Teacher s Edition (TE), Student Edition (SE), Transparencies
: Pearson Program Title: Pearson California and Pearson California Components: : Teacher s Edition (TE), Student Edition (SE), Practice Book (PB); : Teacher s Edition (TE), Student Edition (SE), Transparencies
ScienceDirect. Prediction of Commercial Aircraft Price using the COC & Aircraft Design Factors
 Available online at www.sciencedirect.com ScienceDirect Procedia Engineering 67 ( 2013 ) 70 77 7th Asian-Pacific Conference on Aerospace Technology and Science, 7th APCATS 2013 Prediction of Commercial
Available online at www.sciencedirect.com ScienceDirect Procedia Engineering 67 ( 2013 ) 70 77 7th Asian-Pacific Conference on Aerospace Technology and Science, 7th APCATS 2013 Prediction of Commercial
Schedule Compression by Fair Allocation Methods
 Schedule Compression by Fair Allocation Methods by Michael Ball Andrew Churchill David Lovell University of Maryland and NEXTOR, the National Center of Excellence for Aviation Operations Research November
Schedule Compression by Fair Allocation Methods by Michael Ball Andrew Churchill David Lovell University of Maryland and NEXTOR, the National Center of Excellence for Aviation Operations Research November
ONLINE DELAY MANAGEMENT IN RAILWAYS - SIMULATION OF A TRAIN TIMETABLE
 ONLINE DELAY MANAGEMENT IN RAILWAYS - SIMULATION OF A TRAIN TIMETABLE WITH DECISION RULES - N. VAN MEERTEN 333485 28-08-2013 Econometrics & Operational Research Erasmus University Rotterdam Bachelor thesis
ONLINE DELAY MANAGEMENT IN RAILWAYS - SIMULATION OF A TRAIN TIMETABLE WITH DECISION RULES - N. VAN MEERTEN 333485 28-08-2013 Econometrics & Operational Research Erasmus University Rotterdam Bachelor thesis
RECEDING HORIZON CONTROL FOR AIRPORT CAPACITY MANAGEMENT
 RECEDING HORIZON CONTROL FOR AIRPORT CAPACITY MANAGEMENT W.-H. Chen, X.B. Hu Dept. of Aeronautical & Automotive Engineering, Loughborough University, UK Keywords: Receding Horizon Control, Air Traffic
RECEDING HORIZON CONTROL FOR AIRPORT CAPACITY MANAGEMENT W.-H. Chen, X.B. Hu Dept. of Aeronautical & Automotive Engineering, Loughborough University, UK Keywords: Receding Horizon Control, Air Traffic
Overview ICAO Standards and Recommended Practices for Aerodrome Safeguarding
 Overview ICAO Standards and Recommended Practices for Aerodrome Safeguarding References The Convention on International Civil Aviation (Chicago Convention) ICAO SARPS Annex 14 Vol. I, 7 th Edition, July
Overview ICAO Standards and Recommended Practices for Aerodrome Safeguarding References The Convention on International Civil Aviation (Chicago Convention) ICAO SARPS Annex 14 Vol. I, 7 th Edition, July
Research on Controlled Flight Into Terrain Risk Analysis Based on Bow-tie Model and WQAR Data
 2017 Asia-Pacific Engineering and Technology Conference (APETC 2017) ISBN: 978-1-60595-443-1 Research on Controlled Flight Into Terrain Risk Analysis Based on Bow-tie Model and WQAR Data Haofeng Wang,
2017 Asia-Pacific Engineering and Technology Conference (APETC 2017) ISBN: 978-1-60595-443-1 Research on Controlled Flight Into Terrain Risk Analysis Based on Bow-tie Model and WQAR Data Haofeng Wang,
ANALYSIS OF THE CONTRIUBTION OF FLIGHTPLAN ROUTE SELECTION ON ENROUTE DELAYS USING RAMS
 ANALYSIS OF THE CONTRIUBTION OF FLIGHTPLAN ROUTE SELECTION ON ENROUTE DELAYS USING RAMS Akshay Belle, Lance Sherry, Ph.D, Center for Air Transportation Systems Research, Fairfax, VA Abstract The absence
ANALYSIS OF THE CONTRIUBTION OF FLIGHTPLAN ROUTE SELECTION ON ENROUTE DELAYS USING RAMS Akshay Belle, Lance Sherry, Ph.D, Center for Air Transportation Systems Research, Fairfax, VA Abstract The absence
SECTION 6 - SEPARATION STANDARDS
 SECTION 6 - SEPARATION STANDARDS CHAPTER 1 - PROVISION OF STANDARD SEPARATION 1.1 Standard vertical or horizontal separation shall be provided between: a) All flights in Class A airspace. b) IFR flights
SECTION 6 - SEPARATION STANDARDS CHAPTER 1 - PROVISION OF STANDARD SEPARATION 1.1 Standard vertical or horizontal separation shall be provided between: a) All flights in Class A airspace. b) IFR flights
Comparative Assessments of the Seasonality in "The Total Number of Overnight Stays" in Romania, Bulgaria and the European Union
 Comparative Assessments of the Seasonality in "The Total Number of Overnight Stays" in Romania, Bulgaria and the European Union Jugănaru Ion Dănuț Aivaz Kamer Ainur Jugănaru Mariana Ovidius University
Comparative Assessments of the Seasonality in "The Total Number of Overnight Stays" in Romania, Bulgaria and the European Union Jugănaru Ion Dănuț Aivaz Kamer Ainur Jugănaru Mariana Ovidius University
NCUTCD Proposal for Changes to the Manual on Uniform Traffic Control Devices
 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 TECHNICAL COMMITTEE: ITEM NUMBER: TOPIC: ORIGIN OF REQUEST: AFFECTED SECTIONS OF MUTCD: NCUTCD Proposal for Changes
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 TECHNICAL COMMITTEE: ITEM NUMBER: TOPIC: ORIGIN OF REQUEST: AFFECTED SECTIONS OF MUTCD: NCUTCD Proposal for Changes
Daily Estimation of Passenger Flow in Large and Complicated Urban Railway Network. Shuichi Myojo. Railway Technical Research Institute, Tokyo, Japan
 Daily Estimation of Passenger Flow in Large and Complicated Urban Railway Network Shuichi Myojo Abstract Railway Technical Research Institute, Tokyo, Japan Railway passenger flow data including the on-board
Daily Estimation of Passenger Flow in Large and Complicated Urban Railway Network Shuichi Myojo Abstract Railway Technical Research Institute, Tokyo, Japan Railway passenger flow data including the on-board
J. Oerlemans - SIMPLE GLACIER MODELS
 J. Oerlemans - SIMPE GACIER MODES Figure 1. The slope of a glacier determines to a large extent its sensitivity to climate change. 1. A slab of ice on a sloping bed The really simple glacier has a uniform
J. Oerlemans - SIMPE GACIER MODES Figure 1. The slope of a glacier determines to a large extent its sensitivity to climate change. 1. A slab of ice on a sloping bed The really simple glacier has a uniform
REVISIONS IN THE SPANISH INTERNATIONAL VISITORS ARRIVALS STATISTICS
 Revisions in the Spanish International Visitor Arrivals Statistics REVISIONS IN THE SPANISH INTERNATIONAL VISITORS ARRIVALS STATISTICS Carlos Romero Dexeus 1 Abstract: This article concerns the revision
Revisions in the Spanish International Visitor Arrivals Statistics REVISIONS IN THE SPANISH INTERNATIONAL VISITORS ARRIVALS STATISTICS Carlos Romero Dexeus 1 Abstract: This article concerns the revision
GENERAL ADVISORY CIRCULAR
 GENERAL CIVIL AVIATION AUTHORITY OF BOTSWANA ADVISORY CIRCULAR CAAB Document GAC-002 ACCEPTABLE FLIGHT SAFETY DOCUMENTS SYSTEM GAC-002 Revision: Original August 2012 PAGE 1 Intentionally left blank GAC-002
GENERAL CIVIL AVIATION AUTHORITY OF BOTSWANA ADVISORY CIRCULAR CAAB Document GAC-002 ACCEPTABLE FLIGHT SAFETY DOCUMENTS SYSTEM GAC-002 Revision: Original August 2012 PAGE 1 Intentionally left blank GAC-002
MEASURING ACCESSIBILITY TO PASSENGER FLIGHTS IN EUROPE: TOWARDS HARMONISED INDICATORS AT THE REGIONAL LEVEL. Regional Focus.
 Regional Focus A series of short papers on regional research and indicators produced by the Directorate-General for Regional and Urban Policy 01/2013 SEPTEMBER 2013 MEASURING ACCESSIBILITY TO PASSENGER
Regional Focus A series of short papers on regional research and indicators produced by the Directorate-General for Regional and Urban Policy 01/2013 SEPTEMBER 2013 MEASURING ACCESSIBILITY TO PASSENGER
1. Purpose and scope. a) the necessity to limit flight duty periods with the aim of preventing both kinds of fatigue;
 the necessity to limit flight duty periods with the aim of preventing both kinds of fatigue;") ATTACHMENT A. GUIDANCE MATERIAL FOR DEVELOPMENT OF PRESCRIPTIVE FATIGUE MANAGEMENT REGULATIONS Supplementary to Chapter 4, 4.2.10.2, Chapter 9, 9.6 and Chapter 12, 12.5 1. Purpose and scope 1.1 Flight
ATTACHMENT A. GUIDANCE MATERIAL FOR DEVELOPMENT OF PRESCRIPTIVE FATIGUE MANAGEMENT REGULATIONS Supplementary to Chapter 4, 4.2.10.2, Chapter 9, 9.6 and Chapter 12, 12.5 1. Purpose and scope 1.1 Flight
arxiv: v1 [nlin.cg] 27 Nov 2016
![arxiv: v1 [nlin.cg] 27 Nov 2016](/thumbs/72/67719995.jpg "arxiv: v1 [nlin.cg] 27 Nov 2016") X-Rule s Precursor is also Logically Universal arxiv:1611.08829v1 [nlin.cg] 27 Nov 2016 José Manuel Gómez Soto Universidad Autónoma de Zacatecas. Unidad Académica de Matemáticas. Zacatecas, Zac. México.
X-Rule s Precursor is also Logically Universal arxiv:1611.08829v1 [nlin.cg] 27 Nov 2016 José Manuel Gómez Soto Universidad Autónoma de Zacatecas. Unidad Académica de Matemáticas. Zacatecas, Zac. México.
Gain-Scheduled Control of Blade Loads in a Wind Turbine-Generator System by Individual Blade Pitch Manipulation
 Proceedings of WindEurope Summit 2016 27 29 SEPTEMBER, 2016, HAMBURG, GERMANY Gain-Scheduled Control of Blade Loads in a Wind Turbine-Generator System by Individual Blade Pitch Manipulation Tetsuya WAKUI,
Proceedings of WindEurope Summit 2016 27 29 SEPTEMBER, 2016, HAMBURG, GERMANY Gain-Scheduled Control of Blade Loads in a Wind Turbine-Generator System by Individual Blade Pitch Manipulation Tetsuya WAKUI,
ESTIMATING REVENUES AND CONSUMER SURPLUS FOR THE GERMAN AIR TRANSPORT MARKETS. Richard Klophaus
 ESTIMATING REVENUES AND CONSUMER SURPLUS FOR THE GERMAN AIR TRANSPORT MARKETS Richard Klophaus Worms University of Applied Sciences Center for Aviation Law and Business Erenburgerstraße 19 D-67549 Worms,
ESTIMATING REVENUES AND CONSUMER SURPLUS FOR THE GERMAN AIR TRANSPORT MARKETS Richard Klophaus Worms University of Applied Sciences Center for Aviation Law and Business Erenburgerstraße 19 D-67549 Worms,
Fly at the speed of ingenuity on your Learjet 85
 rockwell collins Pro Line Fusion Avionics Fly at the speed of ingenuity on your Learjet 85 Image courtesy of Bombardier. Experience the most advanced avionics system ever offered on a mid-size jet. Achieve
rockwell collins Pro Line Fusion Avionics Fly at the speed of ingenuity on your Learjet 85 Image courtesy of Bombardier. Experience the most advanced avionics system ever offered on a mid-size jet. Achieve
Transportation Timetabling
 Outline DM87 SCHEDULING, TIMETABLING AND ROUTING Lecture 16 Transportation Timetabling 1. Transportation Timetabling Tanker Scheduling Air Transport Train Timetabling Marco Chiarandini DM87 Scheduling,
Outline DM87 SCHEDULING, TIMETABLING AND ROUTING Lecture 16 Transportation Timetabling 1. Transportation Timetabling Tanker Scheduling Air Transport Train Timetabling Marco Chiarandini DM87 Scheduling,
Flight Arrival Simulation
 Flight Arrival Simulation Ali Reza Afshari Buein Zahra Technical University, Department of Industrial Engineering, Iran, afshari@bzte.ac.ir Mohammad Anisseh Imam Khomeini International University, Department
Flight Arrival Simulation Ali Reza Afshari Buein Zahra Technical University, Department of Industrial Engineering, Iran, afshari@bzte.ac.ir Mohammad Anisseh Imam Khomeini International University, Department
A Coevolutionary Simulation of Real-Time Airport Gate Scheduling
 A Coevolutionary Simulation of Real-Time Airport Scheduling Andrés Gómez de Silva Garza Instituto Tecnológico Autónomo de México (IT) Río Hondo #1, Colonia Tizapán-San Ángel 01000 México, D.F., México
A Coevolutionary Simulation of Real-Time Airport Scheduling Andrés Gómez de Silva Garza Instituto Tecnológico Autónomo de México (IT) Río Hondo #1, Colonia Tizapán-San Ángel 01000 México, D.F., México
Annex III to ED Decision 2017/023/R. AMC and GM to Part-CAT Issue 2, Amendment 13
 Annex III to ED Decision 2017/023/R AMC and GM to Part-CAT Issue 2, Amendment 13 The Annex to Decision 2014/015/R is amended as follows: The text of the amendment is arranged to show deleted text, new
Annex III to ED Decision 2017/023/R AMC and GM to Part-CAT Issue 2, Amendment 13 The Annex to Decision 2014/015/R is amended as follows: The text of the amendment is arranged to show deleted text, new
Air Traffic Management
 Doc 4444 ATM/501 Procedures for Air Navigation Services Air Traffic Management This edition incorporates all amendments approved by the Council prior to 2 June 2007 and supersedes, on 22 November 2007,
Doc 4444 ATM/501 Procedures for Air Navigation Services Air Traffic Management This edition incorporates all amendments approved by the Council prior to 2 June 2007 and supersedes, on 22 November 2007,
MAT 115: Precalculus Mathematics Homework Exercises Textbook: A Graphical Approach to Precalculus with Limits: A Unit Circle Approach, Sixth Edition
 MAT 115: Precalculus Mathematics Homework Exercises Textbook: A Graphical Approach to Precalculus with Limits: A Unit Circle Approach, Sixth Edition Section R.1, Page 923: Review of Exponents and Polynomials
MAT 115: Precalculus Mathematics Homework Exercises Textbook: A Graphical Approach to Precalculus with Limits: A Unit Circle Approach, Sixth Edition Section R.1, Page 923: Review of Exponents and Polynomials
Boarding Pass Issuance to Passengers at Airport
 ENSE623/ENPM645 Boarding Pass Issuance to Passengers at Airport By Soe Zarni Bargava Subramanian University of Maryland December 6, 2005 1 System Boundary Description Airport authorities have fixed(constrained)
ENSE623/ENPM645 Boarding Pass Issuance to Passengers at Airport By Soe Zarni Bargava Subramanian University of Maryland December 6, 2005 1 System Boundary Description Airport authorities have fixed(constrained)
Appendix B Ultimate Airport Capacity and Delay Simulation Modeling Analysis
 Appendix B ULTIMATE AIRPORT CAPACITY & DELAY SIMULATION MODELING ANALYSIS B TABLE OF CONTENTS EXHIBITS TABLES B.1 Introduction... 1 B.2 Simulation Modeling Assumption and Methodology... 4 B.2.1 Runway
Appendix B ULTIMATE AIRPORT CAPACITY & DELAY SIMULATION MODELING ANALYSIS B TABLE OF CONTENTS EXHIBITS TABLES B.1 Introduction... 1 B.2 Simulation Modeling Assumption and Methodology... 4 B.2.1 Runway
ADVANTAGES OF SIMULATION
 ADVANTAGES OF SIMULATION Most complex, real-world systems with stochastic elements cannot be accurately described by a mathematical model that can be evaluated analytically. Thus, a simulation is often
ADVANTAGES OF SIMULATION Most complex, real-world systems with stochastic elements cannot be accurately described by a mathematical model that can be evaluated analytically. Thus, a simulation is often
COLLISIONS ON AIRTRACK
 Physics Deartment Mechanics Laboratory COLLISIONS ON AIRTRACK. Aim The aim of this exeriment is to illustrate the first two of Newton's Laws of Motion, and analyze the conservation of (linear) momentum
Physics Deartment Mechanics Laboratory COLLISIONS ON AIRTRACK. Aim The aim of this exeriment is to illustrate the first two of Newton's Laws of Motion, and analyze the conservation of (linear) momentum
Class F3K Hand Launch Gliders 5.7. CLASS F3K - HAND LAUNCH GLIDERS
 Class F3K Hand Launch Gliders 5.7. CLASS F3K - HAND LAUNCH GLIDERS 5.7.1. General This event is a multitasking contest where RC gliders must be hand-launched and accomplish specific tasks. In principle
Class F3K Hand Launch Gliders 5.7. CLASS F3K - HAND LAUNCH GLIDERS 5.7.1. General This event is a multitasking contest where RC gliders must be hand-launched and accomplish specific tasks. In principle
The Improvement of Airline Tickets Selling Process
 The Improvement of Airline Tickets Selling Process Duran Li (103034466) Department of Industrial Engineering and Engineering Management, National Tsing Hua University, Taiwan Abstract. The process of a
The Improvement of Airline Tickets Selling Process Duran Li (103034466) Department of Industrial Engineering and Engineering Management, National Tsing Hua University, Taiwan Abstract. The process of a
NOTE TO INQUIRY BACKGROUND CRASH RATE DEFINITIONS. TRUDY AUTY, BSc, ARCS FOR LAAG
 TOWN AND COUNTRY PLANNING ACT 1990 - SECTION 77 AND TOWN AND COUNTRY PLANNING (INQUIRIES PROCEDURE) (ENGLAND) RULES 2000 APPLICATIONS BY LONDON ASHFORD AIRPORT LTD SITE AT LONDON ASHFORD AIRPORT LIMITED,
TOWN AND COUNTRY PLANNING ACT 1990 - SECTION 77 AND TOWN AND COUNTRY PLANNING (INQUIRIES PROCEDURE) (ENGLAND) RULES 2000 APPLICATIONS BY LONDON ASHFORD AIRPORT LTD SITE AT LONDON ASHFORD AIRPORT LIMITED,
GUIDANCE MATERIAL CONCERNING FLIGHT TIME AND FLIGHT DUTY TIME LIMITATIONS AND REST PERIODS
 GUIDANCE MATERIAL CONCERNING FLIGHT TIME AND FLIGHT DUTY TIME LIMITATIONS AND REST PERIODS PREAMBLE: Guidance material is provided for any regulation or standard when: (a) (b) The subject area is complex
GUIDANCE MATERIAL CONCERNING FLIGHT TIME AND FLIGHT DUTY TIME LIMITATIONS AND REST PERIODS PREAMBLE: Guidance material is provided for any regulation or standard when: (a) (b) The subject area is complex
An Architecture for Combinator Graph Reduction Philip J. Koopman Jr.
 An Architecture for Combinator Graph Reduction Philip J. Koopman Jr. Copyright 1990, Philip J. Koopman Jr. All Rights Reserved To my parents vi Contents List of Tables.............................. xi
An Architecture for Combinator Graph Reduction Philip J. Koopman Jr. Copyright 1990, Philip J. Koopman Jr. All Rights Reserved To my parents vi Contents List of Tables.............................. xi
An Analytical Approach to the BFS vs. DFS Algorithm Selection Problem 1
 An Analytical Approach to the BFS vs. DFS Algorithm Selection Problem 1 Tom Everitt Marcus Hutter Australian National University September 3, 2015 Everitt, T. and Hutter, M. (2015a). Analytical Results
An Analytical Approach to the BFS vs. DFS Algorithm Selection Problem 1 Tom Everitt Marcus Hutter Australian National University September 3, 2015 Everitt, T. and Hutter, M. (2015a). Analytical Results
Asia Pacific Regional Aviation Safety Team
 International Civil Aviation Organization (ICAO) Regional Aviation Safety Group (Asia & Pacific Regions) Asia Pacific Regional Aviation Safety Team GUIDANCE FOR AIR OPERATORS IN ESTABLISHING A FLIGHT SAFETY
International Civil Aviation Organization (ICAO) Regional Aviation Safety Group (Asia & Pacific Regions) Asia Pacific Regional Aviation Safety Team GUIDANCE FOR AIR OPERATORS IN ESTABLISHING A FLIGHT SAFETY
DGAC Costa Rica. MCAR OPS 1-Subpart Q LIMITATIONS OF FLIGHT TIME AND TIME OF SERVICE AND REST REQUIREMENTS. 30-June-2009
 DGAC Costa Rica MCAR OPS 1-Subpart Q LIMITATIONS OF FLIGHT TIME AND TIME OF SERVICE AND REST REQUIREMENTS 30-June-2009 Contents Contents... 2 SUBPART Q LIMITATIONS OF FLIGHT TIME AND TIME OF SERVICE AND
DGAC Costa Rica MCAR OPS 1-Subpart Q LIMITATIONS OF FLIGHT TIME AND TIME OF SERVICE AND REST REQUIREMENTS 30-June-2009 Contents Contents... 2 SUBPART Q LIMITATIONS OF FLIGHT TIME AND TIME OF SERVICE AND
Kristina Ricks ISYS 520 VBA Project Write-up Around the World
 VBA Project Write-up Around the World Initial Problem Online resources are very valuable when searching for the cheapest flights to any particular location. Sites such as Travelocity.com, Expedia.com,
VBA Project Write-up Around the World Initial Problem Online resources are very valuable when searching for the cheapest flights to any particular location. Sites such as Travelocity.com, Expedia.com,
Lake Manyara Elephant Research
 Elephant Volume 1 Issue 4 Article 16 12-15-1980 Lake Manyara Elephant Research Rick Weyerhaeuser World Wildlife Fund - U.S. Follow this and additional works at: https://digitalcommons.wayne.edu/elephant
Elephant Volume 1 Issue 4 Article 16 12-15-1980 Lake Manyara Elephant Research Rick Weyerhaeuser World Wildlife Fund - U.S. Follow this and additional works at: https://digitalcommons.wayne.edu/elephant
PRESENTATION OVERVIEW
 ATFM PRE-TACTICAL PLANNING Nabil Belouardy PhD student Presentation for Innovative Research Workshop Thursday, December 8th, 2005 Supervised by Prof. Dr. Patrick Bellot ENST Prof. Dr. Vu Duong EEC European
ATFM PRE-TACTICAL PLANNING Nabil Belouardy PhD student Presentation for Innovative Research Workshop Thursday, December 8th, 2005 Supervised by Prof. Dr. Patrick Bellot ENST Prof. Dr. Vu Duong EEC European
G. Glukhov The State Scientific Research Institute of Civil Aviation, Mikhalkovskaya Street, 67, building 1, Moscow, Russia
 International Journal of Civil Engineering and Technology (IJCIET) Volume 10, Issue 04, April 2019, pp. 1486 1494, Article ID: IJCIET_10_04_155 Available online at http://www.iaeme.com/ijmet/issues.asp?jtype=ijciet&vtype=10&itype=4
International Journal of Civil Engineering and Technology (IJCIET) Volume 10, Issue 04, April 2019, pp. 1486 1494, Article ID: IJCIET_10_04_155 Available online at http://www.iaeme.com/ijmet/issues.asp?jtype=ijciet&vtype=10&itype=4
DATA APPLICATION CATEGORY 25 FARE BY RULE
 DATA APPLICATION CATEGORY 25 FARE BY RULE The information contained in this document is the property of ATPCO. No part of this document may be reproduced, stored in a retrieval system, or transmitted in
DATA APPLICATION CATEGORY 25 FARE BY RULE The information contained in this document is the property of ATPCO. No part of this document may be reproduced, stored in a retrieval system, or transmitted in
Mechanics of Frisbee Throwing
 16-741 Mechanics of Manipulation Project Report Mechanics of Frisbee Throwing Debidatta Dwibedi (debidatd) Senthil Purushwalkam (spurushw) Introduction Frisbee is a popular recreational and professional
16-741 Mechanics of Manipulation Project Report Mechanics of Frisbee Throwing Debidatta Dwibedi (debidatd) Senthil Purushwalkam (spurushw) Introduction Frisbee is a popular recreational and professional
A New Way to Work in the ERCOT Market
 Siemens Energy, Inc. Power Technology Issue 111 A New Way to Work in the ERCOT Market Joseph M. Smith Senior Staff Business Development Specialist joseph_smith@siemens.com In recent months The Electric
Siemens Energy, Inc. Power Technology Issue 111 A New Way to Work in the ERCOT Market Joseph M. Smith Senior Staff Business Development Specialist joseph_smith@siemens.com In recent months The Electric
USE OF MICROENCAPSULATED PCM IN BUILDINGS AND THE EFFECT OF ADDING AWNINGS
 USE OF MICROENCAPSULATED PCM IN BUILDINGS AND THE EFFECT OF ADDING AWNINGS ABSTRACT C. Castellón, M. Nogués, G. Pérez, M. Medrano, L.F. Cabeza Centre GREA Innovació Concurrent Edifici CREA, Universitat
USE OF MICROENCAPSULATED PCM IN BUILDINGS AND THE EFFECT OF ADDING AWNINGS ABSTRACT C. Castellón, M. Nogués, G. Pérez, M. Medrano, L.F. Cabeza Centre GREA Innovació Concurrent Edifici CREA, Universitat
REGIONAL ASPECTS OF AGRICULTURAL INCOME LEVEL IN VOJVODINA PROVINCE IN FUNCTION OF BASIC PRODUCTION FACTORS
 REGIONAL ASPECTS OF AGRICULTURAL INCOME LEVEL IN VOJVODINA PROVINCE IN FUNCTION OF BASIC PRODUCTION FACTORS KATARINA ČOBANOVIĆ Faculty of Agriculture Novi Sad, Novi Sad, Serbia. E-mail: katcob@polj.ns.ac.yu
REGIONAL ASPECTS OF AGRICULTURAL INCOME LEVEL IN VOJVODINA PROVINCE IN FUNCTION OF BASIC PRODUCTION FACTORS KATARINA ČOBANOVIĆ Faculty of Agriculture Novi Sad, Novi Sad, Serbia. E-mail: katcob@polj.ns.ac.yu
CAR/SAM ELECTRONIC AIR NAVIGATION PLAN (eanp) (Presented by the Secretariat) EXECUTIVE SUMMARY
 (Presented by the Secretariat) EXECUTIVE SUMMARY") 21/10/15 Twenty-sixth Directors of Civil Aviation of the Eastern Caribbean Meeting (E/CAR/DCA/26) New Orleans, United States, 1-3 December 2015 Agenda Item 6: Air Navigation Matters 6.1 GREPECAS Update
21/10/15 Twenty-sixth Directors of Civil Aviation of the Eastern Caribbean Meeting (E/CAR/DCA/26) New Orleans, United States, 1-3 December 2015 Agenda Item 6: Air Navigation Matters 6.1 GREPECAS Update
Authentic Assessment in Algebra NCCTM Undersea Treasure. Jeffrey Williams. Wake Forest University.
 Undersea Treasure Jeffrey Williams Wake Forest University Willjd9@wfu.edu INTRODUCTION: Everyone wants to find a treasure in their life, especially when it deals with money. Many movies come out each year
Undersea Treasure Jeffrey Williams Wake Forest University Willjd9@wfu.edu INTRODUCTION: Everyone wants to find a treasure in their life, especially when it deals with money. Many movies come out each year
Decisions on which type of approach to use vary with each airline, and sometimes even for each flight. aero quarterly qtr_02 10
 Decisions on which type of approach to use vary with each airline, and sometimes even for each flight. 24 Fuel Conservation Strategies: Descent and Approach The descent and approach phases of flight represent
Decisions on which type of approach to use vary with each airline, and sometimes even for each flight. 24 Fuel Conservation Strategies: Descent and Approach The descent and approach phases of flight represent
12V MOTION SENSOR 98GC779G INSTALLATION & PROGRAMMING GUIDE REV RV AWNING PRODUCTS
 12V MOTION SENSOR 98GC779G INSTALLATION & PROGRAMMING GUIDE REV.07242015 RV AWNING PRODUCTS 1361 CALLE AVANZADO, SAN CLEMENTE, CA 92673 (800) 382-8442 FAX (949)276-5500 www.girardrv.com Girard Systems
12V MOTION SENSOR 98GC779G INSTALLATION & PROGRAMMING GUIDE REV.07242015 RV AWNING PRODUCTS 1361 CALLE AVANZADO, SAN CLEMENTE, CA 92673 (800) 382-8442 FAX (949)276-5500 www.girardrv.com Girard Systems
Applying Integer Linear Programming to the Fleet Assignment Problem
 Applying Integer Linear Programming to the Fleet Assignment Problem ABARA American Airlines Decision Ti'chnohi^ics PO Box 619616 Dallasll'ort Worth Airport, Texas 75261-9616 We formulated and solved the
Applying Integer Linear Programming to the Fleet Assignment Problem ABARA American Airlines Decision Ti'chnohi^ics PO Box 619616 Dallasll'ort Worth Airport, Texas 75261-9616 We formulated and solved the
London Borough of Barnet Traffic & Development Design Team
 London Borough of Barnet Traffic & Development Design Team AERODROME ROAD PEDESTRIAN FACILITY AND BUS STOP INTRODUCTION FEASIBILITY REPORT Job Number: 60668 Doc Ref: S106/12-13/60668 Author: Manoj Kalair
London Borough of Barnet Traffic & Development Design Team AERODROME ROAD PEDESTRIAN FACILITY AND BUS STOP INTRODUCTION FEASIBILITY REPORT Job Number: 60668 Doc Ref: S106/12-13/60668 Author: Manoj Kalair
Aalborg Universitet. Cellular Automata and Urban Development Reinau, Kristian Hegner. Published in: NORDGI : Nordic Geographic Information
 Aalborg Universitet Cellular Automata and Urban Development Reinau, Kristian Hegner Published in: NORDGI : Nordic Geographic Information Publication date: 2006 Document Version Publisher's PDF, also known
Aalborg Universitet Cellular Automata and Urban Development Reinau, Kristian Hegner Published in: NORDGI : Nordic Geographic Information Publication date: 2006 Document Version Publisher's PDF, also known
CHAPTER 5 SIMULATION MODEL TO DETERMINE FREQUENCY OF A SINGLE BUS ROUTE WITH SINGLE AND MULTIPLE HEADWAYS
 91 CHAPTER 5 SIMULATION MODEL TO DETERMINE FREQUENCY OF A SINGLE BUS ROUTE WITH SINGLE AND MULTIPLE HEADWAYS 5.1 INTRODUCTION In chapter 4, from the evaluation of routes and the sensitive analysis, it
91 CHAPTER 5 SIMULATION MODEL TO DETERMINE FREQUENCY OF A SINGLE BUS ROUTE WITH SINGLE AND MULTIPLE HEADWAYS 5.1 INTRODUCTION In chapter 4, from the evaluation of routes and the sensitive analysis, it
Restructuring of advanced instruction and training programs in order to increase the number of flight hours for military pilots.
 Restructuring of advanced instruction and training programs in order to increase the number of flight hours for military pilots. Part II Ioan STEFANESCU* 1 *Corresponding author Aerospace Consulting B-dul
Restructuring of advanced instruction and training programs in order to increase the number of flight hours for military pilots. Part II Ioan STEFANESCU* 1 *Corresponding author Aerospace Consulting B-dul
ATTEND Analytical Tools To Evaluate Negotiation Difficulty
 ATTEND Analytical Tools To Evaluate Negotiation Difficulty Alejandro Bugacov Robert Neches University of Southern California Information Sciences Institute ANTs PI Meeting, November, 2000 Outline 1. Goals
ATTEND Analytical Tools To Evaluate Negotiation Difficulty Alejandro Bugacov Robert Neches University of Southern California Information Sciences Institute ANTs PI Meeting, November, 2000 Outline 1. Goals