CONVEYOR TRACKING SMART COMPONENT. Predmet: Osnove robotike. Podloga za rad u programskom alatu: ABB RobotStudio
|
|
|
- Griffin Douglas
- 6 years ago
- Views:
Transcription


1 VISOKA TEHNIČKA ŠKOLA U BJELOVAR STRUČNI STUDIJ MEHATRONIKE CONVEYOR TRACKING & SMART COMPONENT Predmet: Osnove robotike Podloga za rad u programskom alatu: ABB RobotStudio Mentor: Tomislav Pavlic, mag.ing.mech. Student: Ivan Šimunović Bjelovar 2017
2 Sadržaj: 1 KREIRANJE STANICE NOVA PRAZNA STANICA UVOZ OPREME SET POSITION MODELIRANJE OPREME UVOZ ROBOTA IRB ABB LIBRARY PLACE SPAJANJE KONTROLERA SA ROBOTOM UVOZ ALATA ECCO 70AS STVARANJE POKRETNE TRAKE DISCONECT LIBRARY REFERENCE TRAKE CREATING CONNECTION DODAVANJE CILINDRA NA TRAKU KREIRANJE PUTA AUTO PATH REACHABILITY & JOG POSTAVLJANJE ALATA NA PUTU KONFIGURACIJA ROBOTA USKLAĐIVANJE TRAKE I ROBOTA DODAVANJE INSTRUKCIJE DODAVANJE GLAVNOG PROGRAMA U RAPID SIMULACIJA KONTINUIRANA SIMULACIJA SMART COMPONENT UVOZ MODELA SOLIDWORKSA DODAVANJE PRIHVATNICE STVARANJE PAMETNE PRIHVATNICE(SMART COMPONENT) STVARANJE PAMETNE TRAKE LITERATURA... 67

3 1 Kreiranje stanice 1.1 Nova prazna stanica Nakon dvoklika na ikonu programskog alata RobotStudio otvara se prozor na slici 1.1. Slika 1.1 : Početni okvir programskog alata RobotStudio Nova prazna robotska stanica se kreira odabirom na Empthy station i lijevim klikom na Create ili jednostavno dvoklikom na Empthy station. Početna kartica Home sadrži najčešće korištene opcije koje su ujedno i potrebne za početak rada naše stanice. 3

4 Slika 1:2: Home Kartica 1.2 Uvoz opreme Postoji mogućnost uvoza opreme i radnih djelova iz ostalih programskih alata kao što je na primjer Solidworks. Spremanjem gotovog Solidworks modela u format tipa.sat ili.step što će u daljnjem tekstu biti detaljnije opisano. U ovom radu je korištena oprema već ponuđena od ABB-ove knjižnnice. Kad bi stisnuli Import Library prikazala bi se oprema koja je dostupna za korištenje. Za potrebu Conveyor tracking odabire se Conveyor koje će nam koristiti kao pokretna traka nakon konfiguracije.


5 Slika 1.3: Oprema stanice Nakon odabira pripadajuće opreme pojavi se prozor sa slike 1.4 na kojem se primjenjuje željena duljina i širina trake. Slika 1.4: Dimenzije trake 1.3 Set position Radi jednostavnijeg daljnjeg postavljanja trake, traka se postavlja na glavni koordinatni sustav stanice tako da sredina trake bude središte stanice po X i Y kooridinatama. Desnim klikom na 5


6 pokretnu traku u Layout kartici otvara se prozor gdje se odabire naredba Set Position. Klikom na Set position otvara zasebni prozor gdje upisujemo koordinate i orijentaciju trake. Slika 1.5: Set position prozor Slika 1.6: Pozicija trake 1.4 Modeliranje opreme RobotStudio nudi mmodeliranje jednostavnih oblika kao što su kocka cilindar sfera i ostali. Kao predmet koji će se gibati po traci odabran je cilindar zbog jednostavne geometrije koju će robot pratiti.


7 Slika 1.6: Kartica modeliranje Koordinate na slici 1.7 postavljaju cilindar na pokretnu traku. Koordinate su identične kao koordinate koordinatnog sustava stanice osim koordinate Z koja je podigla pak na stanicu. Slika 1.7: Kreiranje cilindra Osim cilindra potrebno je postolje za robota koji će pratiti cilindar. Postolje se oblikuje na isti način kao i cilindar samo je odabir oblika drugačiji. Duljina pokretne trake je 4800 mm stoga se postolje postavlja polovici te duljine i na razmaku od take koji je dovoljan da robot ima pristup svakoj točki pokretnog predmeta. Obratite pozornost na sliku 1.8 i koordinate postolja. 7



8 Slika 1.8: Postolje i cilindar Slika 1.10: Visible naredba Cilindar trenutno nije potreban stoga je korištena naredba koja uklanja cilindar samo kao grafički prikaz. Cilindar je uklonjen kako bi se traka lakše obavili narebu Conveyor connection koja je obrađenja u daljnjim poglavljima. 2 Uvoz robota IRB ABB Library Pritiskom desnog klika na karticu ABB Library otvara se popis ABB-ovih industrijskih robota. Roboti, pozicioneri, trakeri i roboti za farbanje. Odabran je robot IRB 52 koji je namjenjen za farbanje.


9 Slika 2.1: Odabir robota Slika 2.2: Raspon robota 9




10 Raspon namješten na 1.45m zbog lakšeg pristupa točkama puta. 2.2 Place Place naredba premješta predmet kao što je u ovom slučaju robot IRB 52 sa mjesta na kojem se nalazi na željeno mjesto. Naredba place se koristi uz traku narebi na vrhu grafičkog sučelja stanice prikazanu na slici 2.3. Slika 2.3: Traka naredbi Naredba snap grid prima koordinate sjecišta linija radne stanice. Naredba snap object prima koordinate središta objekta kvadratnog presjeka kao i krajnje i središne djelove bridova tog predmeta. Slika 2.4: Snap Grid & Snap Object

11 Slika 2.5: Place(1) Tipkama Ctrl, Shift i lijevim klikom miša poziociran je pogleda kao na slici 2.5. Naredba Snap Grid je upaljena, zaplavi se koordinata osi X i klikne se na sjecište linija ispod robota. Sličan postupak na se nastavlja dalje. Ovoga puta se odabere naredba Snap Object, zaplavi se donja koordinata X te se klikne na sredinu objekta postolje. Nakon zadnjeg klika na sučeljau će pisati from kao točka na kojoj se nalazi robot i to kao točka na koju će se robot preseliti te će te dvije točke biti povezane linijom. Na kraju radnje tipka aplay potvrđuje place naredbu. Slika 2.7: Place(2) Robot će promjeniti svoje koordinate ali će njegova orijentacija ostati ista stoga je potrebno desnim klikom na robota odabrati naredbu Set Position te okrenuti robota prema pokretnoj traci. Odnosno zaokrenuti ga za 90 stupnjeva oko Z osi. 2.3 Spajanje kontrolera sa robotom Za potrebe ovog projekta koristit ćemo kontroler koji ima opciju praćenja predmeta na pokretnoj traci. Stvaranjem kontrolera From Layout (Slika 2.8) stvaramo kontroler koji je baziran na osnovi onoga što se već koristi u našoj stvorenoj stanici. Stvaranje kontrolera objašnjeno slikama 2.8 do

12 Slika 2.8: Stvaranje kontrolera(1)

13 Slika 2.9: Stvaranje kontrolera(2) 13

14 Slika 2.10: Stvaranje kontrolera (3)
 Pormjena opcija je potrebna zbog Conveyor Tracking zadatka ako se taj zadatak ne korisit u stanici")
15 Slika 2.11: Stvaranje kontrolera (4) Pormjena opcija je potrebna zbog Conveyor Tracking zadatka ako se taj zadatak ne korisit u stanici kontroler se stvori pritiskom na tipku Finish. Daljni zadatak je promjeniti opcije kontrolera prikazano na slici


16 Slika 2.12: Opcije kontrolera Odabrati Motion Coordination->Conveyor Tracking zatim ponovno u novom prozoru ponovno klikom na prozor u crvenom okviru na slici 2.13 konfigurira se kontroler za Conveyor tracking. Nakon konfiguracije Change Options prozor zatvorimo tipkom close te tipkom Finish na prozoru sa slike Slika 2.13: Dependencies


17 Po završetku konfiguracije potrebno je pričekati određeno vrijeme da se kontroler poveže sa stanicom. Slika 2.14: Controller status Slika 2.14 prikazuje kontroler povezana sa stanicom. Okvir se nalazi u donjem desnom kutu sučelja. 2.4 Uvoz alata ECCO 70AS 03 ECCO 70AS 03 je automatski pištolj za sprejanje. Alat ECCO 70AS 03 se uveza na stanicu na isti način kao i pokretna traka. Cilj je povezati alat sa robotom. Povezati se može desnim klikom na ponuđeni alat pritiskom na naredbu -> Attach to i pronalaskom robota na koji želimo povezati sa alatom (Slika 2.15). Slika 2.15: ECCO AS


18 Još jedan način je da jednostavno kliknemo i držimo kursor na alatu i povučemo ga na robota. Nakon što je to napravljeno RobotStudio pita dali želimo da ovom promjenom promjeniti i poziciju alata. Odabire se tipka Yes. Slika 2.16: Position update Nakon što je alat uspješno povezena ostaje još odabrati tip alate kojji će se koristit. Na kartivi Home nalazi se okvir za odabir alata. Potrebno odabrati ECCO AS70 03_ Stvaranje pokretne trake 3.1 Disconect library Kako bi se neka oprema mogla uređivat mora se prvo prekinuti veza sa Library datotekom (Slika 3.1). Desni klik Conveyor-> Disconnect Library.


19 Slika 3.1: Disconnecting Library 3.2 Reference trake Kartica modeling nudi mogućnost kreiranja pokretne trake. Modeling->Create Conveyor. Slika 3.2: Creating Conveyor 19


20 Slika 3.3: Modify Conveyor Koordinate prema slici 3.3. osiguravaju koordinatni sustav samo pokretne trake na sredini i na početku trake. Geometrija trake je Conveyor koji je postavljen u stanicu na samomo početku, tip geometrije je linearan te je dužina trake 4800 mm. Slika 3.4: Conveyor created

21 3.3 Creating connection Spoj Conveyora se može ostvariti na dva načina. Jedan način je: Kartica Layout->Conveyor- >Conncections->Desni klik->add connection. Drugi način je jednostavnim klikom na ikonu Add connection koja se nalazi na kartici modeling na desnom kraju. Slika 3.5: Creating connection Ova radnja će na kraju kreirati radni objekt na koji će se postavit cilindar. Definiraju se offset pozicija i start window kao bitni čimbenici koji postavljaju početak i završetak radnog prostora robota. 21

22 Slika 3.6: Offset ravnina Slika3.7: Start window ravnina Slika 3.8: Minimum distance

23 Slika 3.9: Maximum distance Minimum distance i Maximum distance određuju koliko robot smije izlaziti iz radnog prostora. Slika 3.10: Radni prostor 3.4 Dodavanje cilindra na traku Kartica Layout->Conveyor->Object sorce->desni klik->add object. 23


24 Slika 3.11: Dodavanje cilindra Pod okvirom part bira se predmet koji želimo da se giba po pokrenotj traci. Pitch je raspon po kojem će se gibati predmet odnosno cilindar. Slika 3.12: Postavljanje cilindra

25 Slika 3.13: Postavljanje cilindra na traku Ako se predmet ne bude nalazio na pokretnoj traci ili ako na primjer lebdi iznad pokretne trake kao na slici Tada se odaberu dvije naredbe koje su uokvirene crvenom bojom na toj istoj slici. 25

26 Slika 3.14: Predmet izvan položaja Ove naredbe nam omogućavaju da izmjerimo udaljenost između pojedinih objekata. Predmet je po Z osi podignut za 435 mm te ga treba stustiti na traku. Desni klik na cilindar te odabir Set pitch and offset će nam omogućiti postavljnje cilindra na traku.
 Desnim klikom na Conveyor koji se nalazi u")

27 Slika 3.15: Set pitch and offset (1) Slika 3.16: Set pitch and offset (2) Desnim klikom na Conveyor koji se nalazi u kartici layout dobivamo uvid u opcije koje možemo konfigurirati za stvorenu trraku. Pa tako možemo ponovno postaviti traku, povezanost, namjestiti brzinu predmeta te pomicati predmet po traci. 27


28 Slika 3.17: Conveyor opcije Slika 3.18: Jog


29 Slika 3.19: Motion Slika 3.20: Modify Ako geometrija trake nije pravilna ili ponovno postavljanje vrši se naredbom Modify conveyor. 29


30 4 Kreiranje puta 4.1 Auto path Cilindar se postavlja u radni prostor robota opcijom Jog. Nakon ovoga kreira se put po kojem će alat robota odraditi posao. Put robota će biti jednostavna kružnica. Koristi će se opcija Auto-Path koja sam stvara Targete na geometriji koja se zadaje. Slika 4.1: Auto Path Brid koji se uzima za put je brid gornje strane cilindra. Brid se odabire klikom na njega pri čemu moramo paziti da nam plava strelica ne pokazuje sa strane na brid već odozgora prema dolje. Oblik je kružni a odstupanje i blizina pristupa alata su 100 mm.


31 Slika 4.2: Odabir brida Slika 4.3: Stvaranje puta Slika 4.4 prikazuje Targete koje su stvorene za napravljeni put također pokazuje i instrukcije na kako će se robot gibati po tom putu. Targeti se nalaze pod Wobj_cnv 1 što označava radni prostor pokretne trake. Slika 4.4: Targeti i instrukcije 4.2 Reachability & Jog Funkcija reachability pokazuje koja je točka dostupna robotu a funkcija Jog pomiče predmet po traci. Kombinirajući ove dvije funkcije provjerava se do koje sve točke može doći robot. 31


32 Slika 4.5: Jog tear off Slika 4.6: Jog & Reachability 4.3 Postavljanje alata na putu Zbog lakšeg predočavanja alata na određenu točku puta uključuje se opcija View tool at target. Slika 4.7 pokazuje kako se to radi a slika 4.8 prikazuje koja je orijentacija alata u određenoj točki. Zadatak je da prilagodimo orijentaciju alata tako da robot može poprimiti konfiguraciju kojom može dotaknuti tu točku.


33 Slika 4.7: View tool at target Slika 4.8: Tool at target 33


34 Slika 4.9: Offset position Slika 4.10: Offset apply


35 Bit modifikacije je da se alat okrene prema robotu kao bi robot mogao doseću točku na koju je alat umjeren. Na slici prikazane su točke označene crvenim krugom na koje se robot ne može konfigurirati. Te točke je potrebno dodatno modificirati kako bi se odabrala konfiguracija robota. Modifikacija pozicije alta je prikazana slikama 4.9. i Slika 4.11: Dostupne točke Slika 4.12: Postavljen alat 35

36 Na umu je potrebno imati da se cilindar giba po pokretnoj traci i da će prva točka puta i zadnja točka puta koje se nalaze na istom knofiguracije alata ali i robota. mjestu cilindra na kraju zahtjevati različite 4.4 Konfiguracija robota Na osnovu stupnjeva slobode gibanja i zglobova robota, robot na više načina može doći to jedne točke. To se jasno vidi na slikama 4.14 do Zatadatak je odabrati što jednostavniju konfiguraciju koja što manje opterećuje zglobove robota.. Slika 4.13: konfiguracija pojedine točke


37 Slika 4.14: Konfiguracija 1 Slika 4.15: Konfiguracija 2 Slika 4.16: Konfiguracija 3 37

38 5 Usklađivanje trake i robota 5.1 Dodavanje instrukcije Dodaje se instrukcija kretanja tipa MoveAbsJ. Robotu omogućuje lakše računanje puta za razliku od MoveL instrukcije kod koje robot mora računati koordinate svake točke na putu kojeg prevaljuje. Slika 5.1: MoveAbsJ Slika 5.2: Brzina
39 Smanjivanjem brzine postiže se jednostavnija kalkulacija zglobova. Zone:fine omogućuje jednostavnije računanje koordinata puta kada se koriste Move instrukcije. Ovim akcijama stvorit će se Move instrukciju koja postavlja robota u njegov početni položaj najjednostavnijim putem i bez velikih poteškoća za računanje koordinata. Slika 5.3: Zone-fine 39


40 Slika 5.4: Jump Home Slika 5.5: WorkObject change


41 Slika 5.6: Teach instruction Slika 5.7: Korištenje wobj0 41


42 Slika 5.8: Home instrukcija 5.2 Dodavanje glavnog programa u RAPID Kako bi robot znao što mu je činiti i kojim redoslijedom stavara se glavni program u kojem je točno određeno što će robot raditi i kojim redom. Glavni zadatak neka se zove Main. Slika 5.9: Stvaranje glavnog programa


43 Slika 5.10: Main Slika 5.11: Dodavanje puta u glavni program Klikom na Path_10 i povlačenjem na main jednostavno se dodaje u galvni program put koji smo stvorili AutoPath funkcijom. Da bi projekt radio što mu je namjenjeno potrebno je dodati dodatne instrukcije koje će aktivirati pokretnu traku, čekati radni objekt (cilindar) i 43

44 Slika 5.12: Action Instraction

45 Slika 5.13: ActUnit Default Dodavanjem akcije ActUnit aktivira se CNV1 što predstavlja pokretnu traku koja do sad nije bila aktivna. WaitWObj akcija čeka radni dio to jest cilindar da dođe u radni prostor robota i tek onda nastavlja sa izvršavanjem Path_10. DropWObj akcija koja isključuje predmet koji je prošao kroz radni prostor i prevalio put to jest Pitch koji smo zadali tijekom konfiguracije trake. 45


46 Slika 5.16: WaitWObj Slika 5.17: DropWObj Potrebo je još dodati instrukciju MoveAbsJ_Home u glani program ona se dodaje drag and drop tehnikom u main. Prilikom dodavanja ove instrukcije progrram će javiti da se stvara instrukcija koja je iz radnog objekta wobj0 potrebno je stisnuti Yes i nastaviti.


47 Slika 5.18: wobj0 Slika 5.19: Poredak u Main programu Potrebo je još dodati instrukciju MoveAbsJ_Home u glavni program ona se dodaje drag and drop tehnikom u main. Instrukcija koja postavlja robota u home positio javlja se dva puta na samom početku izvođenja programa te nakon što robot odradi posao dva puta. Prvi instrukciju MoveAbsJ_Home potrebno je kopirati kako bi bila korištena po drugi put klikom na nju, pritiskom na tipke Ctrl+c a zatim odmah i Ctrl+v. 47

48 Slika 5.20: Sinkronizacija sa RAPID-om Nakon velikih promjena na radnoj stanici preporučljivo je sinkroniziratti cijelu stanicu sa Rapid-om. Rapid je programski kod koji se vrti na kontroleru robota. Main program će biti ulazni program cijele stanici na slici 5.23 je prikazan način postavljanja ulaznog programa.

49 Slika 5.21: RAPID 49

50 Slika 5.22: Set as entery point Pod karticom rapid na lijevoj strani sučelja pod Rapid ikonom pronađemo T_ROB1- >Module1->Main. Otvorimo programski kod dvoklikom na Main.


51 Slika 5.23: Primjer RAPID koda 6 Simulacija 6.1 Kontinuirana simulacija Slika 6.1: Simulacija 51

/step AP203->Save Slika 7.")
52 7 Smart component 7.1 Uvoz modela SolidWorksa Save as->save as tipe->acis(*.sat)/step AP203->Save Slika 7.1: SolidWorks model
 7.")

53 Slika 7.2: ACIS(*.sat) 7.2 Dodavanje prihvatnice IRB120 Slika 7.3: Import geometry 53

 Smart component je komponenta kojom se upravlja na temelju ulaznih i izlaznih signala.")
54 Slika 7.4: Browse for geometry Slika 7.5: Alat u stanici Sa prethodnim naučenim modeliranjem i postavljanjem predmeta na željene koordinate stvojen je cilindar i postavljen na neku udaljenost od robota. Za ovaj zadatak potreban je običan kontroler bez dodatnih modula. Slika 7.7: Cilindar 7.3 Stvaranje pametne prihvatnice(smart component) Smart component je komponenta kojom se upravlja na temelju ulaznih i izlaznih signala. Ovaj komponenta će biti prihvatnica koja će imati moći primiti objekt i pustiti ga na temelju signala koji će biti svoreni u dizajnu same komponente.

55 Slika 7.8: Smart component Slikama 7.13 do 7.19 prikazane su komponente koje se koriste za pametnu prihvatnicu. Koomponente kao što su Attacher, Dettacher i Line sensor dodaju se klikom na Add component. Na sljedećim slikamma također je dat kratki opis ulaza i izlaza poojedinih komponenta te što koji zlaz znači. 55


56 Slika 7.9: Spajanje modela sa pametnom komponentom Slika 7.10: Role

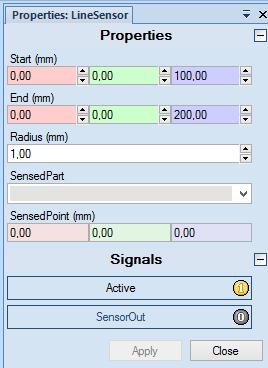
57 Slika 7.11: Line Sensor Slika 7.12: Sensor properties Attacher->Desni klik->properties->paretnt->smartcomponent/pneumatska_prihvatnica 57

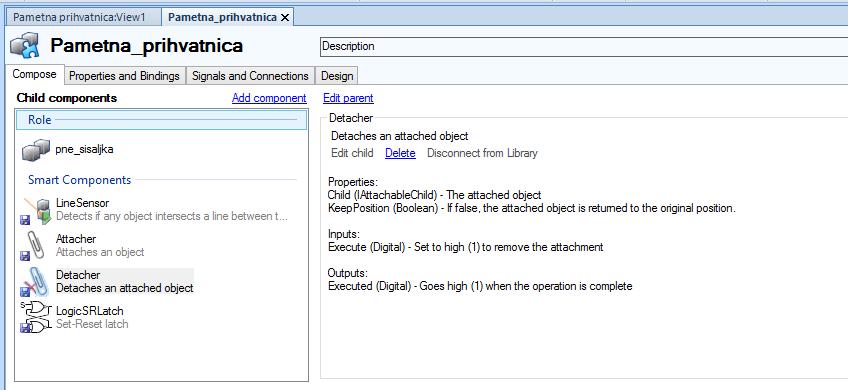
58 Slika 7.13: Attacher Attacher->Desni klik->properties->paretnt->smartcomponent/pneumatska_prihvatnica Slika 7.14: Dettacher

59 Slika 7.15: SR Bistabil Komponenta mora sadržavati signale kako bi se njome moglo upravljati na sljedećim slikama je prikazan način stvaranja ulaznih i izlaznih signala na komponenti. Slika 7.16: Dodavanje signala Kada su signali dodani i sve komponente dodane na kartici designe se spajaju signali sa ulazima i izlazima komponenti. Po završetku spajanja pojedinih koomponenti tako da spojeni signali odgovaraju logici prihvatnice potrebno je spojiti Pametna_Prihvatnica sa uvezenom prihvatnicom koja je već spojena na robota. 59


60 Slika 7.17: Dizajn kartica Slika 7.18: Pametna prihvatnica Sličan postupak kao kod dodavanja pneumatske prihvatnice na smart component se primjenjuje i kada se pametna prihvatnica pričvršćuje na robota. Na slici se jasno vidi i linearni senzor na vrhu prihvatnice čiji je osjetni prostor radijusa jednog milimetra prikazan žutom bojom. 7.4 Stvaranje pametne trake U ovom odjeljku stvcara se pametna pokretna traka. Razlika između prethodno stvorene trake je to što je prethodna traka bila mehanizam a nova traka će biti Smart component. Ovdje će traka imati signal za stvaranje predmeta i signal indikator koji prikazuje da je predmet stigao na senzor.


61 Slika 7.19: Potrebna oprema Slika 7.20: Model kocke Potreban oprema je traka i bilo kakva modelirani oblik u ovom slučaju je to kocka. 61

62 Slika 7.22: Sadržaj pametne trake Slika 7.23: Source Slika 7.24: Queue
63 Slika 7.25: Linear Mover Slika 7.26: Plane sensor Desnim klikom na određene komponente mmjenjaju je opcije te koordinate pojedine kommponente pa tako treba namjestiti sljedeće opcije. 63


64 Slika 7.27: Source properties Za izvor predmeta koji će se poonavljati odabire se kocka koja je prethodno modelirana i pozicionirana na traku. Slika 7.28: Linear mover Linear mover pomiče novo stvorene kocke iz komponente izvor u smijeru X brzinom 200 mm/s te aktivirati komponentu.


65 Slika 7.29: Plane Sensor properies Pažnja se mora posvetiti koordinatama senzora jer se može desiti da se nešto već nalazi u ravnini senzora što tada šalje signal da je kocka stigla. Zato se pažljivo određuju koordinate senzora. Slika 7.30: Signali Prilikom stvaranja signala NovaKocka označite prozorčić Auto reset! 65

66 Slika 7.31: Designe kartica Pregled komponenti se u kartici designe predočuje kao nlokovi povezani signalima. Slika 7.31 prikazuje povezane komponente koje čine jednu pametnu komponentu. Kombiniranjem ostalih komponenti signala i senzora otvara se široka primjena Smart Component opcije.
67 LITERATURA [1] ABB Robotics, Operating manual RobotStudio, [2] ABB Robotics, Technical reference manual RAPID Instructions, Functions and Data types, [3] ABB Robotics, Application manual Conveyor tracking,
Biznis scenario: sekcije pk * id_sekcije * naziv. projekti pk * id_projekta * naziv ꓳ profesor fk * id_sekcije
 Biznis scenario: U školi postoje četiri sekcije sportska, dramska, likovna i novinarska. Svaka sekcija ima nekoliko aktuelnih projekata. Likovna ima četiri projekta. Za projekte Pikaso, Rubens i Rembrant
Biznis scenario: U školi postoje četiri sekcije sportska, dramska, likovna i novinarska. Svaka sekcija ima nekoliko aktuelnih projekata. Likovna ima četiri projekta. Za projekte Pikaso, Rubens i Rembrant
SAS On Demand. Video: Upute za registraciju:
 SAS On Demand Video: http://www.sas.com/apps/webnet/video-sharing.html?bcid=3794695462001 Upute za registraciju: 1. Registracija na stranici: https://odamid.oda.sas.com/sasodaregistration/index.html U
SAS On Demand Video: http://www.sas.com/apps/webnet/video-sharing.html?bcid=3794695462001 Upute za registraciju: 1. Registracija na stranici: https://odamid.oda.sas.com/sasodaregistration/index.html U
Upute za korištenje makronaredbi gml2dwg i gml2dgn
 SVEUČILIŠTE U ZAGREBU - GEODETSKI FAKULTET UNIVERSITY OF ZAGREB - FACULTY OF GEODESY Zavod za primijenjenu geodeziju; Katedra za upravljanje prostornim informacijama Institute of Applied Geodesy; Chair
SVEUČILIŠTE U ZAGREBU - GEODETSKI FAKULTET UNIVERSITY OF ZAGREB - FACULTY OF GEODESY Zavod za primijenjenu geodeziju; Katedra za upravljanje prostornim informacijama Institute of Applied Geodesy; Chair
1. Instalacija programske podrške
 U ovom dokumentu opisana je instalacija PBZ USB PKI uređaja na računala korisnika PBZCOM@NET internetskog bankarstva. Uputa je podijeljena na sljedeće cjeline: 1. Instalacija programske podrške 2. Promjena
U ovom dokumentu opisana je instalacija PBZ USB PKI uređaja na računala korisnika PBZCOM@NET internetskog bankarstva. Uputa je podijeljena na sljedeće cjeline: 1. Instalacija programske podrške 2. Promjena
Podešavanje za eduroam ios
 Copyright by AMRES Ovo uputstvo se odnosi na Apple mobilne uređaje: ipad, iphone, ipod Touch. Konfiguracija podrazumeva podešavanja koja se vrše na računaru i podešavanja na mobilnom uređaju. Podešavanja
Copyright by AMRES Ovo uputstvo se odnosi na Apple mobilne uređaje: ipad, iphone, ipod Touch. Konfiguracija podrazumeva podešavanja koja se vrše na računaru i podešavanja na mobilnom uređaju. Podešavanja
IZDAVANJE SERTIFIKATA NA WINDOWS 10 PLATFORMI
 IZDAVANJE SERTIFIKATA NA WINDOWS 10 PLATFORMI Za pomoć oko izdavanja sertifikata na Windows 10 operativnom sistemu možete se obratiti na e-mejl adresu esupport@eurobank.rs ili pozivom na telefonski broj
IZDAVANJE SERTIFIKATA NA WINDOWS 10 PLATFORMI Za pomoć oko izdavanja sertifikata na Windows 10 operativnom sistemu možete se obratiti na e-mejl adresu esupport@eurobank.rs ili pozivom na telefonski broj
Tutorijal za Štefice za upload slika na forum.
 Tutorijal za Štefice za upload slika na forum. Postoje dvije jednostavne metode za upload slika na forum. Prva metoda: Otvoriti nova tema ili odgovori ili citiraj već prema želji. U donjem dijelu obrasca
Tutorijal za Štefice za upload slika na forum. Postoje dvije jednostavne metode za upload slika na forum. Prva metoda: Otvoriti nova tema ili odgovori ili citiraj već prema želji. U donjem dijelu obrasca
Eduroam O Eduroam servisu edu roam Uputstvo za podešavanje Eduroam konekcije NAPOMENA: Microsoft Windows XP Change advanced settings
 Eduroam O Eduroam servisu Eduroam - educational roaming je besplatan servis za pristup Internetu. Svojim korisnicima omogućava bezbedan, brz i jednostavan pristup Internetu širom sveta, bez potrebe za
Eduroam O Eduroam servisu Eduroam - educational roaming je besplatan servis za pristup Internetu. Svojim korisnicima omogućava bezbedan, brz i jednostavan pristup Internetu širom sveta, bez potrebe za
SIMPLE PAST TENSE (prosto prošlo vreme) Građenje prostog prošlog vremena zavisi od toga da li je glagol koji ga gradi pravilan ili nepravilan.
 Građenje prostog prošlog vremena zavisi od toga da li je glagol koji ga gradi pravilan ili nepravilan.") SIMPLE PAST TENSE (prosto prošlo vreme) Građenje prostog prošlog vremena zavisi od toga da li je glagol koji ga gradi pravilan ili nepravilan. 1) Kod pravilnih glagola, prosto prošlo vreme se gradi tako
SIMPLE PAST TENSE (prosto prošlo vreme) Građenje prostog prošlog vremena zavisi od toga da li je glagol koji ga gradi pravilan ili nepravilan. 1) Kod pravilnih glagola, prosto prošlo vreme se gradi tako
Otpremanje video snimka na YouTube
 Otpremanje video snimka na YouTube Korak br. 1 priprema snimka za otpremanje Da biste mogli da otpremite video snimak na YouTube, potrebno je da imate kreiran nalog na gmailu i da video snimak bude u nekom
Otpremanje video snimka na YouTube Korak br. 1 priprema snimka za otpremanje Da biste mogli da otpremite video snimak na YouTube, potrebno je da imate kreiran nalog na gmailu i da video snimak bude u nekom
KONFIGURACIJA MODEMA. ZyXEL Prestige 660RU
 KONFIGURACIJA MODEMA ZyXEL Prestige 660RU Sadržaj Funkcionalnost lampica... 3 Priključci na stražnjoj strani modema... 4 Proces konfiguracije... 5 Vraćanje modema na tvorničke postavke... 5 Konfiguracija
KONFIGURACIJA MODEMA ZyXEL Prestige 660RU Sadržaj Funkcionalnost lampica... 3 Priključci na stražnjoj strani modema... 4 Proces konfiguracije... 5 Vraćanje modema na tvorničke postavke... 5 Konfiguracija
Port Community System
 Port Community System Konferencija o jedinstvenom pomorskom sučelju i digitalizaciji u pomorskom prometu 17. Siječanj 2018. godine, Zagreb Darko Plećaš Voditelj Odsjeka IS-a 1 Sadržaj Razvoj lokalnog PCS
Port Community System Konferencija o jedinstvenom pomorskom sučelju i digitalizaciji u pomorskom prometu 17. Siječanj 2018. godine, Zagreb Darko Plećaš Voditelj Odsjeka IS-a 1 Sadržaj Razvoj lokalnog PCS
GUI Layout Manager-i. Bojan Tomić Branislav Vidojević
 GUI Layout Manager-i Bojan Tomić Branislav Vidojević Layout Manager-i ContentPane Centralni deo prozora Na njega se dodaju ostale komponente (dugmići, polja za unos...) To je objekat klase javax.swing.jpanel
GUI Layout Manager-i Bojan Tomić Branislav Vidojević Layout Manager-i ContentPane Centralni deo prozora Na njega se dodaju ostale komponente (dugmići, polja za unos...) To je objekat klase javax.swing.jpanel
JEDINSTVENI PORTAL POREZNE UPRAVE. Priručnik za instalaciju Google Chrome dodatka. (Opera preglednik)
") JEDINSTVENI PORTAL POREZNE UPRAVE Priručnik za instalaciju Google Chrome dodatka (Opera preglednik) V1 OPERA PREGLEDNIK Opera preglednik s verzijom 32 na dalje ima tehnološke promjene zbog kojih nije moguće
JEDINSTVENI PORTAL POREZNE UPRAVE Priručnik za instalaciju Google Chrome dodatka (Opera preglednik) V1 OPERA PREGLEDNIK Opera preglednik s verzijom 32 na dalje ima tehnološke promjene zbog kojih nije moguće
PROJEKTNI PRORAČUN 1
 PROJEKTNI PRORAČUN 1 Programski period 2014. 2020. Kategorije troškova Pojednostavlj ene opcije troškova (flat rate, lump sum) Radni paketi Pripremni troškovi, troškovi zatvaranja projekta Stope financiranja
PROJEKTNI PRORAČUN 1 Programski period 2014. 2020. Kategorije troškova Pojednostavlj ene opcije troškova (flat rate, lump sum) Radni paketi Pripremni troškovi, troškovi zatvaranja projekta Stope financiranja
CJENIK APLIKACIJE CERAMIC PRO PROIZVODA STAKLO PLASTIKA AUTO LAK KOŽA I TEKSTIL ALU FELGE SVJETLA
 KOŽA I TEKSTIL ALU FELGE CJENIK APLIKACIJE CERAMIC PRO PROIZVODA Radovi prije aplikacije: Prije nanošenja Ceramic Pro premaza površina vozila na koju se nanosi mora bi dovedena u korektno stanje. Proces
KOŽA I TEKSTIL ALU FELGE CJENIK APLIKACIJE CERAMIC PRO PROIZVODA Radovi prije aplikacije: Prije nanošenja Ceramic Pro premaza površina vozila na koju se nanosi mora bi dovedena u korektno stanje. Proces
Ulazne promenljive se nazivaju argumenti ili fiktivni parametri. Potprogram se poziva u okviru programa, kada se pri pozivu navode stvarni parametri.
 Potprogrami su delovi programa. Često se delovi koda ponavljaju u okviru nekog programa. Logično je da se ta grupa komandi izdvoji u potprogram, i da se po želji poziva u okviru programa tamo gde je potrebno.
Potprogrami su delovi programa. Često se delovi koda ponavljaju u okviru nekog programa. Logično je da se ta grupa komandi izdvoji u potprogram, i da se po želji poziva u okviru programa tamo gde je potrebno.
- Vežba 1 (dodatan materijal) - Kreiranje Web šablona (template) pomoću softvera Adobe Photoshop CS
 - Kreiranje Web šablona (template) pomoću softvera Adobe Photoshop CS") - Vežba 1 (dodatan materijal) - Kreiranje Web šablona (template) pomoću softvera Adobe Photoshop CS 1. Pokrenite Adobe Photoshop CS i otvorite novi dokument sa komandom File / New 2. Otvoriće se dijalog
- Vežba 1 (dodatan materijal) - Kreiranje Web šablona (template) pomoću softvera Adobe Photoshop CS 1. Pokrenite Adobe Photoshop CS i otvorite novi dokument sa komandom File / New 2. Otvoriće se dijalog
NIS PETROL. Uputstvo za deaktiviranje/aktiviranje stranice Veleprodajnog cenovnika na sajtu NIS Petrol-a
 NIS PETROL Uputstvo za deaktiviranje/aktiviranje stranice Veleprodajnog cenovnika na sajtu NIS Petrol-a Beograd, 2018. Copyright Belit Sadržaj Disable... 2 Komentar na PHP kod... 4 Prava pristupa... 6
NIS PETROL Uputstvo za deaktiviranje/aktiviranje stranice Veleprodajnog cenovnika na sajtu NIS Petrol-a Beograd, 2018. Copyright Belit Sadržaj Disable... 2 Komentar na PHP kod... 4 Prava pristupa... 6
STRUKTURNO KABLIRANJE
 STRUKTURNO KABLIRANJE Sistematski pristup kabliranju Kreiranje hijerarhijski organizirane kabelske infrastrukture Za strukturno kabliranje potrebno je ispuniti: Generalnost ožičenja Zasidenost radnog područja
STRUKTURNO KABLIRANJE Sistematski pristup kabliranju Kreiranje hijerarhijski organizirane kabelske infrastrukture Za strukturno kabliranje potrebno je ispuniti: Generalnost ožičenja Zasidenost radnog područja
Pravljenje Screenshota. 1. Korak
 Prvo i osnovno, da biste uspesno odradili ovaj tutorijal, morate imati instaliran GOM Player. Instalacija je vrlo jednostavna, i ovaj player u sebi sadrzi sve neophodne kodeke za pustanje video zapisa,
Prvo i osnovno, da biste uspesno odradili ovaj tutorijal, morate imati instaliran GOM Player. Instalacija je vrlo jednostavna, i ovaj player u sebi sadrzi sve neophodne kodeke za pustanje video zapisa,
CJENOVNIK KABLOVSKA TV DIGITALNA TV INTERNET USLUGE
 CJENOVNIK KABLOVSKA TV Za zasnivanje pretplatničkog odnosa za korištenje usluga kablovske televizije potrebno je da je tehnički izvodljivo (mogude) priključenje na mrežu Kablovskih televizija HS i HKBnet
CJENOVNIK KABLOVSKA TV Za zasnivanje pretplatničkog odnosa za korištenje usluga kablovske televizije potrebno je da je tehnički izvodljivo (mogude) priključenje na mrežu Kablovskih televizija HS i HKBnet
VEŽBA 4 TOOLS - RAD SA ALATIMA
 VEŽBA 4 TOOLS - RAD SA ALATIMA Tools (opis i rad sa alatima) Alati (Tools) Ovde ćemo objasniti alate koji se upotrebljavaju u Premiere Pro programu: Tool Bar - Alati 1: (V na tastaturi) Selection (strelica)
VEŽBA 4 TOOLS - RAD SA ALATIMA Tools (opis i rad sa alatima) Alati (Tools) Ovde ćemo objasniti alate koji se upotrebljavaju u Premiere Pro programu: Tool Bar - Alati 1: (V na tastaturi) Selection (strelica)
Office 365, upute za korištenje elektroničke pošte
 Office 365, upute za korištenje elektroničke pošte Naša ustanova koristi uslugu elektroničke pošte u oblaku, u sklopu usluge Office 365. To znači da elektronička pošta više nije pohranjena na našem serveru
Office 365, upute za korištenje elektroničke pošte Naša ustanova koristi uslugu elektroničke pošte u oblaku, u sklopu usluge Office 365. To znači da elektronička pošta više nije pohranjena na našem serveru
Idejno rješenje: Dubrovnik Vizualni identitet kandidature Dubrovnika za Europsku prijestolnicu kulture 2020.
 Idejno rješenje: Dubrovnik 2020. Vizualni identitet kandidature Dubrovnika za Europsku prijestolnicu kulture 2020. vizualni identitet kandidature dubrovnika za europsku prijestolnicu kulture 2020. visual
Idejno rješenje: Dubrovnik 2020. Vizualni identitet kandidature Dubrovnika za Europsku prijestolnicu kulture 2020. vizualni identitet kandidature dubrovnika za europsku prijestolnicu kulture 2020. visual
KAPACITET USB GB. Laserska gravura. po jednoj strani. Digitalna štampa, pun kolor, po jednoj strani USB GB 8 GB 16 GB.
 9.72 8.24 6.75 6.55 6.13 po 9.30 7.89 5.86 10.48 8.89 7.30 7.06 6.61 11.51 9.75 8.00 7.75 7.25 po 0.38 10.21 8.66 7.11 6.89 6.44 11.40 9.66 9.73 7.69 7.19 12.43 1 8.38 7.83 po 0.55 0.48 0.37 11.76 9.98
9.72 8.24 6.75 6.55 6.13 po 9.30 7.89 5.86 10.48 8.89 7.30 7.06 6.61 11.51 9.75 8.00 7.75 7.25 po 0.38 10.21 8.66 7.11 6.89 6.44 11.40 9.66 9.73 7.69 7.19 12.43 1 8.38 7.83 po 0.55 0.48 0.37 11.76 9.98
TRAJANJE AKCIJE ILI PRETHODNOG ISTEKA ZALIHA ZELENI ALAT
 TRAJANJE AKCIJE 16.01.2019-28.02.2019 ILI PRETHODNOG ISTEKA ZALIHA ZELENI ALAT Akcija sa poklonima Digitally signed by pki, pki, BOSCH, EMEA, BOSCH, EMEA, R, A, radivoje.stevanovic R, A, 2019.01.15 11:41:02
TRAJANJE AKCIJE 16.01.2019-28.02.2019 ILI PRETHODNOG ISTEKA ZALIHA ZELENI ALAT Akcija sa poklonima Digitally signed by pki, pki, BOSCH, EMEA, BOSCH, EMEA, R, A, radivoje.stevanovic R, A, 2019.01.15 11:41:02
mdita Editor - Korisničko uputstvo -
 mdita Editor - Korisničko uputstvo - Sadržaj 1. Minimalna specifikacija računara... 3 2. Uputstvo za instalaciju aplikacije... 3 3. Korisničko uputstvo... 11 3.1 Odabir File opcije iz menija... 11 3.2
mdita Editor - Korisničko uputstvo - Sadržaj 1. Minimalna specifikacija računara... 3 2. Uputstvo za instalaciju aplikacije... 3 3. Korisničko uputstvo... 11 3.1 Odabir File opcije iz menija... 11 3.2
AMRES eduroam update, CAT alat za kreiranje instalera za korisničke uređaje. Marko Eremija Sastanak administratora, Beograd,
 AMRES eduroam update, CAT alat za kreiranje instalera za korisničke uređaje Marko Eremija Sastanak administratora, Beograd, 12.12.2013. Sadržaj eduroam - uvod AMRES eduroam statistika Novine u okviru eduroam
AMRES eduroam update, CAT alat za kreiranje instalera za korisničke uređaje Marko Eremija Sastanak administratora, Beograd, 12.12.2013. Sadržaj eduroam - uvod AMRES eduroam statistika Novine u okviru eduroam
Da bi se napravio izvještaj u Accessu potrebno je na izborniku Create odabrati karticu naredbi Reports.
 IZVJEŠTAJI U MICROSOFT ACCESS-u (eng. reports) su dijelovi baze podataka koji omogućavaju definiranje i opisivanje načina ispisa podataka iz baze podataka na papir (ili PDF dokument). Način izrade identičan
IZVJEŠTAJI U MICROSOFT ACCESS-u (eng. reports) su dijelovi baze podataka koji omogućavaju definiranje i opisivanje načina ispisa podataka iz baze podataka na papir (ili PDF dokument). Način izrade identičan
Nejednakosti s faktorijelima
 Osječki matematički list 7007, 8 87 8 Nejedakosti s faktorijelima Ilija Ilišević Sažetak Opisae su tehike kako se mogu dokazati ejedakosti koje sadrže faktorijele Spomeute tehike su ilustrirae a izu zaimljivih
Osječki matematički list 7007, 8 87 8 Nejedakosti s faktorijelima Ilija Ilišević Sažetak Opisae su tehike kako se mogu dokazati ejedakosti koje sadrže faktorijele Spomeute tehike su ilustrirae a izu zaimljivih
Bušilice nove generacije. ImpactDrill
 NOVITET Bušilice nove generacije ImpactDrill Nove udarne bušilice od Bosch-a EasyImpact 550 EasyImpact 570 UniversalImpact 700 UniversalImpact 800 AdvancedImpact 900 Dostupna od 01.05.2017 2 Logika iza
NOVITET Bušilice nove generacije ImpactDrill Nove udarne bušilice od Bosch-a EasyImpact 550 EasyImpact 570 UniversalImpact 700 UniversalImpact 800 AdvancedImpact 900 Dostupna od 01.05.2017 2 Logika iza
Svojstva olovke x (0,0)
") Kornjačina grafika O modulu turtle Sadrži funkcije za crtanje Izvođenjem naredbi otvara se grafički prozor veličine 600x600 piksela Olovka (pokazivač) je postavljena u središtu prozora i usmjerena udesno
Kornjačina grafika O modulu turtle Sadrži funkcije za crtanje Izvođenjem naredbi otvara se grafički prozor veličine 600x600 piksela Olovka (pokazivač) je postavljena u središtu prozora i usmjerena udesno
BENCHMARKING HOSTELA
 BENCHMARKING HOSTELA IZVJEŠTAJ ZA SVIBANJ. BENCHMARKING HOSTELA 1. DEFINIRANJE UZORKA Tablica 1. Struktura uzorka 1 BROJ HOSTELA BROJ KREVETA Ukupno 1016 643 1971 Regije Istra 2 227 Kvarner 4 5 245 991
BENCHMARKING HOSTELA IZVJEŠTAJ ZA SVIBANJ. BENCHMARKING HOSTELA 1. DEFINIRANJE UZORKA Tablica 1. Struktura uzorka 1 BROJ HOSTELA BROJ KREVETA Ukupno 1016 643 1971 Regije Istra 2 227 Kvarner 4 5 245 991
Windows Easy Transfer
 čet, 2014-04-17 12:21 - Goran Šljivić U članku o skorom isteku Windows XP podrške [1] koja prestaje 8. travnja 2014. spomenuli smo PCmover Express i PCmover Professional kao rješenja za preseljenje korisničkih
čet, 2014-04-17 12:21 - Goran Šljivić U članku o skorom isteku Windows XP podrške [1] koja prestaje 8. travnja 2014. spomenuli smo PCmover Express i PCmover Professional kao rješenja za preseljenje korisničkih
Primjer 3 Prikaz i interpretacija rezultata
 Primjer 3 Prikaz i interpretacija rezultata - uđite u task Postprocessing - odaberite naredbu Results - odaberite prikaz Von Misesovih naprezanja: - odaberite iz popisa stavku 2 - B.C. 1.STRESS_2 i pomoću
Primjer 3 Prikaz i interpretacija rezultata - uđite u task Postprocessing - odaberite naredbu Results - odaberite prikaz Von Misesovih naprezanja: - odaberite iz popisa stavku 2 - B.C. 1.STRESS_2 i pomoću
Upotreba selektora. June 04
 Upotreba selektora programa KRONOS 1 Kronos sistem - razina 1 Podešavanje vremena LAMPEGGIANTI 1. Kada je pećnica uključena prvi put, ili u slučaju kvara ili prekida u napajanju, simbol SATA i odgovarajuća
Upotreba selektora programa KRONOS 1 Kronos sistem - razina 1 Podešavanje vremena LAMPEGGIANTI 1. Kada je pećnica uključena prvi put, ili u slučaju kvara ili prekida u napajanju, simbol SATA i odgovarajuća
Primer-1 Nacrtati deo lanca.
 Primer-1 Nacrtati deo lanca. 1. Nacrtati krug sa Ellipse alatkom i sa CTRL tasterom. 2. Napraviti kopiju kruga unutar glavnog kruga (desni klik za kopiju). 3. Selektovati oba kruga pa onda ih kombinovati
Primer-1 Nacrtati deo lanca. 1. Nacrtati krug sa Ellipse alatkom i sa CTRL tasterom. 2. Napraviti kopiju kruga unutar glavnog kruga (desni klik za kopiju). 3. Selektovati oba kruga pa onda ih kombinovati
UPUTE ZA INSTALACIJU PROGRAMA FINBOLT 2007 tvrtke BOLTANO d.o.o.
 UPUTE ZA INSTALACIJU PROGRAMA FINBOLT 2007 tvrtke BOLTANO d.o.o. Šta je potrebno za ispravan rad programa? Da bi program FINBOLT 2007 ispravno i kvalitetno izvršavao zadaću koja je postavljena pred njega
UPUTE ZA INSTALACIJU PROGRAMA FINBOLT 2007 tvrtke BOLTANO d.o.o. Šta je potrebno za ispravan rad programa? Da bi program FINBOLT 2007 ispravno i kvalitetno izvršavao zadaću koja je postavljena pred njega
MASKE U MICROSOFT ACCESS-u
 MASKE U MICROSOFT ACCESS-u Maske (Forms) ili obrasci su objekti baze podataka u Accessu koji služe za unošenje, brisanje i mijenjanje podataka u tablicama ili upitima koji imaju ljepše korisničko sučelje
MASKE U MICROSOFT ACCESS-u Maske (Forms) ili obrasci su objekti baze podataka u Accessu koji služe za unošenje, brisanje i mijenjanje podataka u tablicama ili upitima koji imaju ljepše korisničko sučelje
KRATKI PRIRUČNIK IZRADA MENTALNIH MAPA U PROGRAMU MS VISIO Bosiljka Jurjević
 KRATKI PRIRUČNIK IZRADA MENTALNIH MAPA U PROGRAMU MS VISIO 2007 Bosiljka Jurjević 3.11.2010. UKRATKO O MENTALNIM MAPAMA Mentalna mapa (mapa misli) je: - organizacijski alat za razmišljanje, - najjednostavniji
KRATKI PRIRUČNIK IZRADA MENTALNIH MAPA U PROGRAMU MS VISIO 2007 Bosiljka Jurjević 3.11.2010. UKRATKO O MENTALNIM MAPAMA Mentalna mapa (mapa misli) je: - organizacijski alat za razmišljanje, - najjednostavniji
INSTALIRANJE SOFTVERSKOG SISTEMA SURVEY
 INSTALIRANJE SOFTVERSKOG SISTEMA SURVEY Softverski sistem Survey za geodeziju, digitalnu topografiju i projektovanje u niskogradnji instalira se na sledeći način: 1. Instalirati grafičko okruženje pod
INSTALIRANJE SOFTVERSKOG SISTEMA SURVEY Softverski sistem Survey za geodeziju, digitalnu topografiju i projektovanje u niskogradnji instalira se na sledeći način: 1. Instalirati grafičko okruženje pod
Programiranje za internet zimski semestar 2013/2014. Java kroz primjere (skripta je u fazi izradi)
") Programiranje za internet zimski semestar 2013/2014 Java kroz primjere (skripta je u fazi izradi) Zadatak broj 1 Nacrtati kocku. (Zanimljiv teži problem za razmišljanje: Nacrtat kocku čije će dimenzije
Programiranje za internet zimski semestar 2013/2014 Java kroz primjere (skripta je u fazi izradi) Zadatak broj 1 Nacrtati kocku. (Zanimljiv teži problem za razmišljanje: Nacrtat kocku čije će dimenzije
KAKO GA TVORIMO? Tvorimo ga tako, da glagol postavimo v preteklik (past simple): 1. GLAGOL BITI - WAS / WERE TRDILNA OBLIKA:
: 1. GLAGOL BITI - WAS / WERE TRDILNA OBLIKA:") Past simple uporabljamo, ko želimo opisati dogodke, ki so se zgodili v preteklosti. Dogodki so se zaključili v preteklosti in nič več ne trajajo. Dogodki so se zgodili enkrat in se ne ponavljajo, čas dogodkov
Past simple uporabljamo, ko želimo opisati dogodke, ki so se zgodili v preteklosti. Dogodki so se zaključili v preteklosti in nič več ne trajajo. Dogodki so se zgodili enkrat in se ne ponavljajo, čas dogodkov
Babylon - instalacija,aktivacija i rad sa njim
 Babylon - instalacija,aktivacija i rad sa njim Babilon je vodeći svetski prevodilac brzog online i offline rečnika sa prevođenjem u preko 75 jezika jednim jednostavnim klikom misa i koriste ga miloni privatnih
Babylon - instalacija,aktivacija i rad sa njim Babilon je vodeći svetski prevodilac brzog online i offline rečnika sa prevođenjem u preko 75 jezika jednim jednostavnim klikom misa i koriste ga miloni privatnih
Prezentacije (PowerPoint 2003)
") Prezentacije (PowerPoint 2003) 1 Koriste ga svi koji žele drugima prezentirati (prikazati) neki sadržaj, a naročito kada želimo da to vidi više ljudi. Sadržaj se prezentira izmjenom stranica (slajdova)
Prezentacije (PowerPoint 2003) 1 Koriste ga svi koji žele drugima prezentirati (prikazati) neki sadržaj, a naročito kada želimo da to vidi više ljudi. Sadržaj se prezentira izmjenom stranica (slajdova)
Inkscape ili vektorska grafika za svakoga
 Inkscape ili vektorska grafika za svakoga Inkscape 0.91 R600 priručnik za polaznike 2016 Srce Ovaj priručnik izradio je autorski tim Srca u sastavu: Autor: Dominik Kenđel Recenzent: Ante Jurjević Urednica:
Inkscape ili vektorska grafika za svakoga Inkscape 0.91 R600 priručnik za polaznike 2016 Srce Ovaj priručnik izradio je autorski tim Srca u sastavu: Autor: Dominik Kenđel Recenzent: Ante Jurjević Urednica:
Vježba 4. Zadatak Ispod naslova napisati sljedeći tekst (bez okvira):
:") Vježba 4 Zadatak 1 PRETVARANJE TEKSTA U TABLICU 1. U novootvoreni dokument na početku stranice napisati naslov: TABLICE i pritisnuti Enter. Zatim, označiti redak naslova i dodijeliti mu stil prve razine
Vježba 4 Zadatak 1 PRETVARANJE TEKSTA U TABLICU 1. U novootvoreni dokument na početku stranice napisati naslov: TABLICE i pritisnuti Enter. Zatim, označiti redak naslova i dodijeliti mu stil prve razine
za STB GO4TV in alliance with GSS media
 za STB Dugme za uključivanje i isključivanje STB uređaja Browser Glavni meni Osnovni meni Vrsta liste kanala / omiljeni kanali / kraći meni / organizacija kanala / ponovno pokretanje uređaja / ponovno
za STB Dugme za uključivanje i isključivanje STB uređaja Browser Glavni meni Osnovni meni Vrsta liste kanala / omiljeni kanali / kraći meni / organizacija kanala / ponovno pokretanje uređaja / ponovno
SVEUČILIŠTE U ZAGREBU FAKULTET STROJARSTVA I BRODOGRADNJE DIPLOMSKI RAD. Goran Antić. Zagreb, 2013.
 SVEUČILIŠTE U ZAGREBU FAKULTET STROJARSTVA I BRODOGRADNJE DIPLOMSKI RAD Goran Antić Zagreb, 2013. SVEUČILIŠTE U ZAGREBU FAKULTET STROJARSTVA I BRODOGRADNJE DIPLOMSKI RAD Mentor: Prof. dr. sc. Bojan Jerbić,
SVEUČILIŠTE U ZAGREBU FAKULTET STROJARSTVA I BRODOGRADNJE DIPLOMSKI RAD Goran Antić Zagreb, 2013. SVEUČILIŠTE U ZAGREBU FAKULTET STROJARSTVA I BRODOGRADNJE DIPLOMSKI RAD Mentor: Prof. dr. sc. Bojan Jerbić,
Direktan link ka kursu:
 Alat Alice može da se preuzme sa sledeće adrese: www.alice.org Kratka video uputstva posvećena alatu Alice: https://youtu.be/eq120m-_4ua https://youtu.be/tkbucu71lfk Kurs (engleski) posvećen uvodu u Java
Alat Alice može da se preuzme sa sledeće adrese: www.alice.org Kratka video uputstva posvećena alatu Alice: https://youtu.be/eq120m-_4ua https://youtu.be/tkbucu71lfk Kurs (engleski) posvećen uvodu u Java
TRENING I RAZVOJ VEŽBE 4 JELENA ANĐELKOVIĆ LABROVIĆ
 TRENING I RAZVOJ VEŽBE 4 JELENA ANĐELKOVIĆ LABROVIĆ DIZAJN TRENINGA Model trening procesa FAZA DIZAJNA CILJEVI TRENINGA Vrste ciljeva treninga 1. Ciljevi učesnika u treningu 2. Ciljevi učenja Opisuju željene
TRENING I RAZVOJ VEŽBE 4 JELENA ANĐELKOVIĆ LABROVIĆ DIZAJN TRENINGA Model trening procesa FAZA DIZAJNA CILJEVI TRENINGA Vrste ciljeva treninga 1. Ciljevi učesnika u treningu 2. Ciljevi učenja Opisuju željene
Uputstva za upotrebu štampača CITIZEN S310II
 Upravljanje sistemom COBISS Uputstva za upotrebu štampača CITIZEN S310II V1.0 VIF-NA-27-XX IZUM, 2015. COBISS, COMARC, COBIB, COLIB, IZUM su zaštićeni znaci u posedu javnog zavoda IZUM. SADRŽAJ 1 Uvod...
Upravljanje sistemom COBISS Uputstva za upotrebu štampača CITIZEN S310II V1.0 VIF-NA-27-XX IZUM, 2015. COBISS, COMARC, COBIB, COLIB, IZUM su zaštićeni znaci u posedu javnog zavoda IZUM. SADRŽAJ 1 Uvod...
PRIRUČNIK ZA POČETNIKE U INFORMATICI
 PRIRUČNIK ZA POČETNIKE U INFORMATICI ~ I ~ SADRŽAJ 1. Prikaz tipkovnice s osnovnim funkcijama... 1 2. Prikaz radne površine... 2 3. MS Word... 3 3.1. Vrpca... 4 3.1.1. Rad s vrpcom... 5 3.1.2. Minimiziranje
PRIRUČNIK ZA POČETNIKE U INFORMATICI ~ I ~ SADRŽAJ 1. Prikaz tipkovnice s osnovnim funkcijama... 1 2. Prikaz radne površine... 2 3. MS Word... 3 3.1. Vrpca... 4 3.1.1. Rad s vrpcom... 5 3.1.2. Minimiziranje
Uvod u micro:bit Tomislav Pandurić
 Uvod u micro:bit Tomislav Pandurić Osnovna škola Franje Krežme, Osijek 26. veljače 2017. Sadržaj Upoznajmo micro:bit... 1 Programiranje micro:bita... 3 Microsoft PXT... 6 Komunikacija s računalom... 14
Uvod u micro:bit Tomislav Pandurić Osnovna škola Franje Krežme, Osijek 26. veljače 2017. Sadržaj Upoznajmo micro:bit... 1 Programiranje micro:bita... 3 Microsoft PXT... 6 Komunikacija s računalom... 14
Mindomo online aplikacija za izradu umnih mapa
 Mindomo online aplikacija za izradu umnih mapa Mindomo je online aplikacija za izradu umnih mapa (vrsta dijagrama specifične forme koji prikazuje ideje ili razmišljanja na svojevrstan način) koja omogućuje
Mindomo online aplikacija za izradu umnih mapa Mindomo je online aplikacija za izradu umnih mapa (vrsta dijagrama specifične forme koji prikazuje ideje ili razmišljanja na svojevrstan način) koja omogućuje
LabVIEW-ZADACI. 1. Napisati program u LabVIEW-u koji računa zbir dva broja.
 LabVIEW-ZADACI 1. Napisati program u LabVIEW-u koji računa zbir dva broja. Startovati LabVIEW Birati New VI U okviru Controls Pallete birati numerički kontroler tipa Numerical Control, i postaviti ga na
LabVIEW-ZADACI 1. Napisati program u LabVIEW-u koji računa zbir dva broja. Startovati LabVIEW Birati New VI U okviru Controls Pallete birati numerički kontroler tipa Numerical Control, i postaviti ga na
Ollydbg. Petar Afrić,
 Ollydbg Petar Afrić, 0036469979 Mentor: prof. Marin Golub Akademska godina 2014/2015 0 Sadržaj 0 Sadržaj... 1 1 Uvod... 2 1.1 Sistemski zahtjevi za Ollydbg... 2 1.2 Privatnost korisnika Ollydbg-a... 3
Ollydbg Petar Afrić, 0036469979 Mentor: prof. Marin Golub Akademska godina 2014/2015 0 Sadržaj 0 Sadržaj... 1 1 Uvod... 2 1.1 Sistemski zahtjevi za Ollydbg... 2 1.2 Privatnost korisnika Ollydbg-a... 3
Informatika 2 CorelDRAW 12
 CorelDRAW 12 Grafički prikaz na računalu jest zajednički nazivnik za sve pojmove koji se rabe u tom smislu korištenja računala: programi za crtanje, dizajn, slikanje i sl. Razlikuju se programi temeljeni
CorelDRAW 12 Grafički prikaz na računalu jest zajednički nazivnik za sve pojmove koji se rabe u tom smislu korištenja računala: programi za crtanje, dizajn, slikanje i sl. Razlikuju se programi temeljeni
Microsoft Project 2013
 2013/14 Microsoft Project 2013 Osnovne upute Ove upute su namijenjene samo studentima Visoke škole za informacijske tehnologije Predmet: Vođenje projekata i dokumentacije mr.sc. Milorad Nikitovid, dipl.ing.
2013/14 Microsoft Project 2013 Osnovne upute Ove upute su namijenjene samo studentima Visoke škole za informacijske tehnologije Predmet: Vođenje projekata i dokumentacije mr.sc. Milorad Nikitovid, dipl.ing.
IZVODI IZ PREDAVANJA
 RAČUNALSTVO Za 2. razred Zanimanje: GRAĐEVINSKI TEHNIČAR i ARHITEKTONSKI TEHNIČAR IZVODI IZ PREDAVANJA - Osnove programa za crtanje i projektiranje uz pomoć računala Vlasta Abramić, dipl.oecc.org.inf.usmjerenja
RAČUNALSTVO Za 2. razred Zanimanje: GRAĐEVINSKI TEHNIČAR i ARHITEKTONSKI TEHNIČAR IZVODI IZ PREDAVANJA - Osnove programa za crtanje i projektiranje uz pomoć računala Vlasta Abramić, dipl.oecc.org.inf.usmjerenja
KRATKI PRIRUČNIK IZRADA MENTALNIH MAPA U PROGRAMU MS VISIO Bosiljka Jurjević
 KRATKI PRIRUČNIK IZRADA MENTALNIH MAPA U PROGRAMU MS VISIO 2010 Bosiljka Jurjević 3.11.2010. UKRATKO O MENTALNIM MAPAMA Mentalna mapa (mapa misli) je: - organizacijski alat za razmišljanje, - najjednostavniji
KRATKI PRIRUČNIK IZRADA MENTALNIH MAPA U PROGRAMU MS VISIO 2010 Bosiljka Jurjević 3.11.2010. UKRATKO O MENTALNIM MAPAMA Mentalna mapa (mapa misli) je: - organizacijski alat za razmišljanje, - najjednostavniji
UPUTSTVO. za ruter TP-LINK TD-854W/ TD-W8951NB
 UPUTSTVO za ruter TP-LINK TD-854W/ TD-W8951NB Uputstvo za ruter TP-Link TD-854W / TD-W8951NB 2 PRAVILNO POVEZIVANJE ADSL RUTERA...4 PODEŠAVANJE KONEKCIJE PREKO MREŽNE KARTE ETHERNET-a...5 PODEŠAVANJE INTERNET
UPUTSTVO za ruter TP-LINK TD-854W/ TD-W8951NB Uputstvo za ruter TP-Link TD-854W / TD-W8951NB 2 PRAVILNO POVEZIVANJE ADSL RUTERA...4 PODEŠAVANJE KONEKCIJE PREKO MREŽNE KARTE ETHERNET-a...5 PODEŠAVANJE INTERNET
Pokretanje (startovanje) programa Microsoft Word
 programa Microsoft Word") Šta je Microsoft Word? Microsoft Word je korisnički (aplikativni) program - tekst procesor, za unos, promenu, uređenje, skladištenje (čuvanje, arhiviranje) i štampanje dokumenta. Word je sastavni deo programskog
Šta je Microsoft Word? Microsoft Word je korisnički (aplikativni) program - tekst procesor, za unos, promenu, uređenje, skladištenje (čuvanje, arhiviranje) i štampanje dokumenta. Word je sastavni deo programskog
ENR 1.4 OPIS I KLASIFIKACIJA VAZDUŠNOG PROSTORA U KOME SE PRUŽAJU ATS USLUGE ENR 1.4 ATS AIRSPACE CLASSIFICATION AND DESCRIPTION
 VFR AIP Srbija / Crna Gora ENR 1.4 1 ENR 1.4 OPIS I KLASIFIKACIJA VAZDUŠNOG PROSTORA U KOME SE PRUŽAJU ATS USLUGE ENR 1.4 ATS AIRSPACE CLASSIFICATION AND DESCRIPTION 1. KLASIFIKACIJA VAZDUŠNOG PROSTORA
VFR AIP Srbija / Crna Gora ENR 1.4 1 ENR 1.4 OPIS I KLASIFIKACIJA VAZDUŠNOG PROSTORA U KOME SE PRUŽAJU ATS USLUGE ENR 1.4 ATS AIRSPACE CLASSIFICATION AND DESCRIPTION 1. KLASIFIKACIJA VAZDUŠNOG PROSTORA
Vježbe 6 Povezivanje prostornih i atributnih podataka
 Vježbe 6 Povezivanje prostornih i atributnih podataka 1. Pokrenite novi projekt u QGIS-u i dodajte podatke: Zagreb_GrCetvrti_HTRS.tif 2.Provjerite da su vam vidljive (uključene) alatne trake Digitaliziranje
Vježbe 6 Povezivanje prostornih i atributnih podataka 1. Pokrenite novi projekt u QGIS-u i dodajte podatke: Zagreb_GrCetvrti_HTRS.tif 2.Provjerite da su vam vidljive (uključene) alatne trake Digitaliziranje
3D GRAFIKA I ANIMACIJA
 1 3D GRAFIKA I ANIMACIJA Uvod u Flash CS3 Šta će se raditi? 2 Upoznavanje interfejsa Osnovne osobine Definisanje osnovnih entiteta Rad sa bojama Rad sa linijama Definisanje i podešavanje ispuna Pregled
1 3D GRAFIKA I ANIMACIJA Uvod u Flash CS3 Šta će se raditi? 2 Upoznavanje interfejsa Osnovne osobine Definisanje osnovnih entiteta Rad sa bojama Rad sa linijama Definisanje i podešavanje ispuna Pregled
MINISTRY OF THE SEA, TRANSPORT AND INFRASTRUCTURE
 MINISTRY OF THE SEA, TRANSPORT AND INFRASTRUCTURE 3309 Pursuant to Article 1021 paragraph 3 subparagraph 5 of the Maritime Code ("Official Gazette" No. 181/04 and 76/07) the Minister of the Sea, Transport
MINISTRY OF THE SEA, TRANSPORT AND INFRASTRUCTURE 3309 Pursuant to Article 1021 paragraph 3 subparagraph 5 of the Maritime Code ("Official Gazette" No. 181/04 and 76/07) the Minister of the Sea, Transport
Upute za VDSL modem Innbox F60 FTTH
 Upute za VDSL modem Innbox F60 FTTH Default Login Details LAN IP Address User Name Password http://192.168.1.1 user user Funkcionalnost lampica LED Stanje Opis Phone USB Wireless Data Internet Broadband
Upute za VDSL modem Innbox F60 FTTH Default Login Details LAN IP Address User Name Password http://192.168.1.1 user user Funkcionalnost lampica LED Stanje Opis Phone USB Wireless Data Internet Broadband
Uvod u MS Word. Nova znanja. Novi pojmovi
 Uvod u MS Word Na početku učenja novog programa najbolje ga je pokrenuti i malo prošetati po njemu. Pogledati osnovni izgled prozora, proanalizirati što sadrži, otvarati izbornike i pogledati koje naredbe
Uvod u MS Word Na početku učenja novog programa najbolje ga je pokrenuti i malo prošetati po njemu. Pogledati osnovni izgled prozora, proanalizirati što sadrži, otvarati izbornike i pogledati koje naredbe
3. Obavljanje ulazno-izlaznih operacija, prekidni rad
 3. Obavljanje ulazno-izlaznih operacija, prekidni rad 3.1. Spajanje naprava u ra unalo Slika 3.1. Spajanje UI naprava na sabirnicu 3.2. Kori²tenje UI naprava radnim ekanjem Slika 3.2. Pristupni sklop UI
3. Obavljanje ulazno-izlaznih operacija, prekidni rad 3.1. Spajanje naprava u ra unalo Slika 3.1. Spajanje UI naprava na sabirnicu 3.2. Kori²tenje UI naprava radnim ekanjem Slika 3.2. Pristupni sklop UI
UPITI (Queries) U MICROSOFT ACCESSU XP
 U MICROSOFT ACCESSU XP") UPITI (Queries) U MICROSOFT ACCESSU XP Odabirom opcije [Queries] na izborniku [Objects] koji se nalazi s lijeve strane glavnog prozora baze na većem dijelu ekrana pojavljuju se dva osnovna načina izrade
UPITI (Queries) U MICROSOFT ACCESSU XP Odabirom opcije [Queries] na izborniku [Objects] koji se nalazi s lijeve strane glavnog prozora baze na većem dijelu ekrana pojavljuju se dva osnovna načina izrade
MRS MRSLab09 Metodologija Razvoja Softvera Vežba 09
 MRS MRSLab09 Metodologija Razvoja Softvera Vežba 09 LAB 09 Fizički model podatka 1. Fizički model podataka Fizički model podataka omogućava da se definiše struktura baze podataka sa stanovišta fizičke
MRS MRSLab09 Metodologija Razvoja Softvera Vežba 09 LAB 09 Fizički model podatka 1. Fizički model podataka Fizički model podataka omogućava da se definiše struktura baze podataka sa stanovišta fizičke
Slagalica init screen Prikaz atributi 1.1. Jednostavna slagalica
 1. Pristup programiranju kod kojeg radimo s objektima koji međusobno komuniciraju zovemo objektno usmjereno programiranje. Svuda oko nas nalaze se objekti: računalo, mobitel, vozilo, knjiga, neki geometrijski
1. Pristup programiranju kod kojeg radimo s objektima koji međusobno komuniciraju zovemo objektno usmjereno programiranje. Svuda oko nas nalaze se objekti: računalo, mobitel, vozilo, knjiga, neki geometrijski
STRUČNA PRAKSA B-PRO TEMA 13
 MAŠINSKI FAKULTET U BEOGRADU Katedra za proizvodno mašinstvo STRUČNA PRAKSA B-PRO TEMA 13 MONTAŽA I SISTEM KVALITETA MONTAŽA Kratak opis montže i ispitivanja gotovog proizvoda. Dati izgled i sadržaj tehnološkog
MAŠINSKI FAKULTET U BEOGRADU Katedra za proizvodno mašinstvo STRUČNA PRAKSA B-PRO TEMA 13 MONTAŽA I SISTEM KVALITETA MONTAŽA Kratak opis montže i ispitivanja gotovog proizvoda. Dati izgled i sadržaj tehnološkog
pokret računalnog opismenjavanja izgradnja e - učenje modernog društva ITdesk.info projekt računalne e-edukacije sa slobodnim pristupom
 pokret računalnog opismenjavanja izgradnja modernog društva ITdesk.info projekt računalne e-edukacije sa slobodnim pristupom - Priručnik za digitalnu pismenost e - učenje ljudska prava na edukaciju i informacije
pokret računalnog opismenjavanja izgradnja modernog društva ITdesk.info projekt računalne e-edukacije sa slobodnim pristupom - Priručnik za digitalnu pismenost e - učenje ljudska prava na edukaciju i informacije
RANI BOOKING TURSKA LJETO 2017
 PUTNIČKA AGENCIJA FIBULA AIR TRAVEL AGENCY D.O.O. UL. FERHADIJA 24; 71000 SARAJEVO; BIH TEL:033/232523; 033/570700; E-MAIL: INFO@FIBULA.BA; FIBULA@BIH.NET.BA; WEB: WWW.FIBULA.BA SUDSKI REGISTAR: UF/I-1769/02,
PUTNIČKA AGENCIJA FIBULA AIR TRAVEL AGENCY D.O.O. UL. FERHADIJA 24; 71000 SARAJEVO; BIH TEL:033/232523; 033/570700; E-MAIL: INFO@FIBULA.BA; FIBULA@BIH.NET.BA; WEB: WWW.FIBULA.BA SUDSKI REGISTAR: UF/I-1769/02,
Za kvadratnu ploču s malim kružnim otvorom u sredini opterećenu prema slici potrebno je odrediti raspodjelu naprezanja na presjeku A-A.
 MKE: Primjer 3 - analiticko rjesenje 1 Promjer 2 Za kvadratnu ploču s malim kružnim otvorom u sredini opterećenu prema slici potrebno je odrediti raspodjelu naprezanja na presjeku A-A. Kao referentno analitičko
MKE: Primjer 3 - analiticko rjesenje 1 Promjer 2 Za kvadratnu ploču s malim kružnim otvorom u sredini opterećenu prema slici potrebno je odrediti raspodjelu naprezanja na presjeku A-A. Kao referentno analitičko
Kako instalirati Apache/PHP/MySQL na lokalnom kompjuteru pod Windowsima
 Kako instalirati Apache/PHP/MySQL na lokalnom kompjuteru pod Windowsima 1. Uvod 2. Preuzimanje programa i stvaranje mapa 3. Instalacija Apachea 4. Konfiguracija Apachea 5. Instalacija PHP-a 6. Konfiguracija
Kako instalirati Apache/PHP/MySQL na lokalnom kompjuteru pod Windowsima 1. Uvod 2. Preuzimanje programa i stvaranje mapa 3. Instalacija Apachea 4. Konfiguracija Apachea 5. Instalacija PHP-a 6. Konfiguracija
CRNA GORA
 HOTEL PARK 4* POLOŽAJ: uz more u Boki kotorskoj, 12 km od Herceg-Novog. SADRŽAJI: 252 sobe, recepcija, bar, restoran, besplatno parkiralište, unutarnji i vanjski bazen s terasom za sunčanje, fitnes i SPA
HOTEL PARK 4* POLOŽAJ: uz more u Boki kotorskoj, 12 km od Herceg-Novog. SADRŽAJI: 252 sobe, recepcija, bar, restoran, besplatno parkiralište, unutarnji i vanjski bazen s terasom za sunčanje, fitnes i SPA
MRS. MRSLab03 Metodologija Razvoja Softvera Vežba 03 LAB Dijagram aktivnosti
 MRS LAB 03 MRSLab03 Metodologija Razvoja Softvera Vežba 03 Dijagrami aktivnosti 1. Dijagram aktivnosti Dijagram aktivnosti je UML dijagram koji modeluje dinamičke aspekte sistema. On predstavlja pojednostavljenje
MRS LAB 03 MRSLab03 Metodologija Razvoja Softvera Vežba 03 Dijagrami aktivnosti 1. Dijagram aktivnosti Dijagram aktivnosti je UML dijagram koji modeluje dinamičke aspekte sistema. On predstavlja pojednostavljenje
SOUTH S82 GNSS Carlson SurvCE
 SOUTH S82 GNSS Carlson SurvCE Brze upute Uvod...1 Posao...2 Insertiranje koo dokumenta u posao...6 Pregled zapisa točaka...8 Postavljanje GPS prijemnika...9 Monitor/Skyplot i Equip izbornik...14 Lokalizacija...17
SOUTH S82 GNSS Carlson SurvCE Brze upute Uvod...1 Posao...2 Insertiranje koo dokumenta u posao...6 Pregled zapisa točaka...8 Postavljanje GPS prijemnika...9 Monitor/Skyplot i Equip izbornik...14 Lokalizacija...17
Sveučilište u Zagrebu Fakultet prometnih znanosti Zavod za inteligentne transportne sustave Katedra za primijenjeno računarstvo
 Sveučilište u Zagrebu Fakultet prometnih znanosti Zavod za inteligentne transportne sustave Katedra za primijenjeno računarstvo Vježba: #6 Kolegij: Umjetna inteligencija Tema: Neuronske mreže Vježbu pripremili:
Sveučilište u Zagrebu Fakultet prometnih znanosti Zavod za inteligentne transportne sustave Katedra za primijenjeno računarstvo Vježba: #6 Kolegij: Umjetna inteligencija Tema: Neuronske mreže Vježbu pripremili:
UNIVERZITET U BEOGRADU RUDARSKO GEOLOŠKI FAKULTET DEPARTMAN ZA HIDROGEOLOGIJU ZBORNIK RADOVA. ZLATIBOR maj godine
 UNIVERZITETUBEOGRADU RUDARSKOGEOLOŠKIFAKULTET DEPARTMANZAHIDROGEOLOGIJU ZBORNIKRADOVA ZLATIBOR 1720.maj2012.godine XIVSRPSKISIMPOZIJUMOHIDROGEOLOGIJI ZBORNIKRADOVA IZDAVA: ZAIZDAVAA: TEHNIKIUREDNICI: TIRAŽ:
UNIVERZITETUBEOGRADU RUDARSKOGEOLOŠKIFAKULTET DEPARTMANZAHIDROGEOLOGIJU ZBORNIKRADOVA ZLATIBOR 1720.maj2012.godine XIVSRPSKISIMPOZIJUMOHIDROGEOLOGIJI ZBORNIKRADOVA IZDAVA: ZAIZDAVAA: TEHNIKIUREDNICI: TIRAŽ:
OSNOVE QGIS-a ZA ARHEOLOGE
 Institut za arheologiju / Arheološki muzej u Zagrebu Nera Šegvić, Filomena Sirovica, Kristina Turkalj Priručnik uz radionicu: OSNOVE QGIS-a ZA ARHEOLOGE Arheološki muzej u Zagrebu, 27. lipnja 2016. OSNOVE
Institut za arheologiju / Arheološki muzej u Zagrebu Nera Šegvić, Filomena Sirovica, Kristina Turkalj Priručnik uz radionicu: OSNOVE QGIS-a ZA ARHEOLOGE Arheološki muzej u Zagrebu, 27. lipnja 2016. OSNOVE
Uvod u relacione baze podataka
 Uvod u relacione baze podataka 25. novembar 2011. godine 7. čas SQL skalarne funkcije, operatori ANY (SOME) i ALL 1. Za svakog studenta izdvojiti ime i prezime i broj različitih ispita koje je pao (ako
Uvod u relacione baze podataka 25. novembar 2011. godine 7. čas SQL skalarne funkcije, operatori ANY (SOME) i ALL 1. Za svakog studenta izdvojiti ime i prezime i broj različitih ispita koje je pao (ako
ZAŠTITA NA RADU KOD INDUSTRIJSKIH ROBOTA
 VELEUČILIŠTE U KARLOVCU ODJEL SIGURNOSTI I ZAŠTITE STRUČNI STUDIJ SIGURNOSTI I ZAŠTITE MIHAELA MEDVED ZAŠTITA NA RADU KOD INDUSTRIJSKIH ROBOTA ZAVRŠNI RAD Karlovac, 2017 Karlovac University of Applied
VELEUČILIŠTE U KARLOVCU ODJEL SIGURNOSTI I ZAŠTITE STRUČNI STUDIJ SIGURNOSTI I ZAŠTITE MIHAELA MEDVED ZAŠTITA NA RADU KOD INDUSTRIJSKIH ROBOTA ZAVRŠNI RAD Karlovac, 2017 Karlovac University of Applied
Simulacija rada PIC mikrokontrolera
 INFOTEH-JAHORINA Vol. 11, March 2012. Simulacija rada PIC mikrokontrolera Željko Gavrić, Stefan Tešanović studenti prvog ciklusa studija Fakultet za informacione tehnologije, Slobomir P Univerzitet Doboj,
INFOTEH-JAHORINA Vol. 11, March 2012. Simulacija rada PIC mikrokontrolera Željko Gavrić, Stefan Tešanović studenti prvog ciklusa studija Fakultet za informacione tehnologije, Slobomir P Univerzitet Doboj,
PowerPoint deo Umetanje oblika (shapes)
") PowerPoint 2010 2. deo Umetanje oblika (shapes) Vrši se preko Insert menija: Insert Illustrations Shapes. Bira se jedan od ponuđenih oblika, kliknemo na mesto gde želimo da ga stavimo i vučemo dok se ne
PowerPoint 2010 2. deo Umetanje oblika (shapes) Vrši se preko Insert menija: Insert Illustrations Shapes. Bira se jedan od ponuđenih oblika, kliknemo na mesto gde želimo da ga stavimo i vučemo dok se ne
WELLNESS & SPA YOUR SERENITY IS OUR PRIORITY. VAŠ MIR JE NAŠ PRIORITET!
 WELLNESS & SPA YOUR SERENITY IS OUR PRIORITY. VAŠ MIR JE NAŠ PRIORITET! WELLNESS & SPA DNEVNA KARTA DAILY TICKET 35 BAM / 3h / person RADNO VRIJEME OPENING HOURS 08:00-21:00 Besplatno za djecu do 6 godina
WELLNESS & SPA YOUR SERENITY IS OUR PRIORITY. VAŠ MIR JE NAŠ PRIORITET! WELLNESS & SPA DNEVNA KARTA DAILY TICKET 35 BAM / 3h / person RADNO VRIJEME OPENING HOURS 08:00-21:00 Besplatno za djecu do 6 godina
ITdesk.info - projekt računalne e-edukacije sa slobodnim pristupom. Izrada prezentacija - Microsoft PowerPoint 2010 PRIRUČNIK
 pokret računalnog opismenjavanja e-učenje ITdesk.info - projekt računalne e-edukacije sa slobodnim pristupom e-inkluzija Izrada prezentacija - Microsoft PowerPoint 2010 slobodan pristup PRIRUČNIK ljudska
pokret računalnog opismenjavanja e-učenje ITdesk.info - projekt računalne e-edukacije sa slobodnim pristupom e-inkluzija Izrada prezentacija - Microsoft PowerPoint 2010 slobodan pristup PRIRUČNIK ljudska
Prvi koraci u razvoju bankarskog on-line sistema u Japanu napravljeni su sredinom 60-tih godina prošlog veka i to najpre za on-line, real-time obradu
 JAPAN Japan, kao zemlja napredne tehnologije, elektronike i telekomunikacija, je zemlja koja je u samom svetskom vrhu po razvoju i usavršavanju bankarskog poslovanja i spada među vodećim zemljama sveta
JAPAN Japan, kao zemlja napredne tehnologije, elektronike i telekomunikacija, je zemlja koja je u samom svetskom vrhu po razvoju i usavršavanju bankarskog poslovanja i spada među vodećim zemljama sveta
DOVŠITI CRTEŽ IZ PRETHODNE VJEŽBE... Vježba: Nacrtati prikazani crtež.
 Edukaciska vrzija AutoCAD-a za studente -> Download (http://students.autodesk.com/) DOVŠITI CRTEŽ IZ PRETHODNE VJEŽBE... Vježba: Nacrtati prikazani crtež. PRESJECI PRESJEKOM SE PREDOČUJE UNUTRAŠNJI IZGLED
Edukaciska vrzija AutoCAD-a za studente -> Download (http://students.autodesk.com/) DOVŠITI CRTEŽ IZ PRETHODNE VJEŽBE... Vježba: Nacrtati prikazani crtež. PRESJECI PRESJEKOM SE PREDOČUJE UNUTRAŠNJI IZGLED
OBLIKOVANJE WEB STRANICA Praktikum (laboratorijske vježbe) Haidi Božiković
 Haidi Božiković") OBLIKOVANJE WEB STRANICA Praktikum (laboratorijske vježbe) Haidi Božiković SADRŽAJ 1 Obrada slika korištenjem programa GIMP... 3 1.1 Upoznavanje s okruženjem i alatima GIMP-a... 3 1.2 Rad s maskama...
OBLIKOVANJE WEB STRANICA Praktikum (laboratorijske vježbe) Haidi Božiković SADRŽAJ 1 Obrada slika korištenjem programa GIMP... 3 1.1 Upoznavanje s okruženjem i alatima GIMP-a... 3 1.2 Rad s maskama...
ODGOVORI NA PITANJA IZ NC UPRAVLJANJA
 ODGOVORI NA PITANJA IZ NC UPRAVLJANJA 1. Koje su referentne točke NC stroja glodalice EMCO PC MILL 105? R N W M M strojna nul točka (Machine zero point) Pozicija ove točke se ne može mijenjati. Određena
ODGOVORI NA PITANJA IZ NC UPRAVLJANJA 1. Koje su referentne točke NC stroja glodalice EMCO PC MILL 105? R N W M M strojna nul točka (Machine zero point) Pozicija ove točke se ne može mijenjati. Određena
WWF. Jahorina
 WWF For an introduction Jahorina 23.2.2009 What WWF is World Wide Fund for Nature (formerly World Wildlife Fund) In the US still World Wildlife Fund The World s leading independent conservation organisation
WWF For an introduction Jahorina 23.2.2009 What WWF is World Wide Fund for Nature (formerly World Wildlife Fund) In the US still World Wildlife Fund The World s leading independent conservation organisation
USB Key Uputa za instaliranje programske potpore i registraciju korisnika
 Uputa za instaliranje programske potpore i registraciju korisnika 1 SADRŽAJ 1. UVOD 3 2. SPAJANJE USB KEYJA NA RAČUNALO 4 2.1. PROVJERA RADA USB KEYJA 4 3. INSTALIRANJE PROGRAMSKE POTPORE 5 3.1. INSTALIRANJE
Uputa za instaliranje programske potpore i registraciju korisnika 1 SADRŽAJ 1. UVOD 3 2. SPAJANJE USB KEYJA NA RAČUNALO 4 2.1. PROVJERA RADA USB KEYJA 4 3. INSTALIRANJE PROGRAMSKE POTPORE 5 3.1. INSTALIRANJE
METODE SOFTVERSKOG PODEŠAVANJA BOJA
 Primjena digitalne fotografije u reprodukcijskim medijima Katedra za grafički dizajn i slikovne informacije Grafički fakultet Sveučilišta u Zagrebu METODE SOFTVERSKOG PODEŠAVANJA BOJA SEMINARSKI RAD Nositelji
Primjena digitalne fotografije u reprodukcijskim medijima Katedra za grafički dizajn i slikovne informacije Grafički fakultet Sveučilišta u Zagrebu METODE SOFTVERSKOG PODEŠAVANJA BOJA SEMINARSKI RAD Nositelji
sys.monitor Published on sys.portal (
 Icinga web nadzor () Što je Icinga 2 i Icinga Web 2? Prijava za unos poslužitelja Upravljačka ploča Dodavanje uređaja u Icinga sustav za nadzor Dodavanje hostova u nadzor Dodavanje servisa nadziranom hostu
Icinga web nadzor () Što je Icinga 2 i Icinga Web 2? Prijava za unos poslužitelja Upravljačka ploča Dodavanje uređaja u Icinga sustav za nadzor Dodavanje hostova u nadzor Dodavanje servisa nadziranom hostu
Tablični kalkulator Excel 7.0 Klinča Sela 2005.
 Pripremio: Dragutin Kuhar Tablični kalkulator Excel 7.0 Klinča Sela 2005. Uredio : D. Kuhar SADRŽAJ 1.UVOD...2 1.1 Općenito o tabličnim kalkulatorima...2 1.2 Općenito o Excel-u 7.0...3 2. POČETAK RADA
Pripremio: Dragutin Kuhar Tablični kalkulator Excel 7.0 Klinča Sela 2005. Uredio : D. Kuhar SADRŽAJ 1.UVOD...2 1.1 Općenito o tabličnim kalkulatorima...2 1.2 Općenito o Excel-u 7.0...3 2. POČETAK RADA